 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearching for Quantum Effects in the Brain: A Bell-Type Test for Nonclassical Latent Representations in Autoencoders
Jan 15, 2026Whether neural information processing is entirely classical or involves quantum-mechanical elements remains an open question. Here we propose a model-agnostic, information-theoretic test of nonclassicality that bypasses microscopic assumptions and instead probes the structure of neural representations themselves. Using autoencoders as a transparent model system, we introduce a Bell-type consistency test in latent space, and ask whether decoding statistics obtained under multiple readout contexts can be jointly explained by a single positive latent-variable distribution. By shifting the search for quantum-like signatures in neural systems from microscopic dynamics to experimentally testable constraints on information processing, this work opens a new route for probing the fundamental physics of neural computation.
Cross-Species and Cross-Modality Epileptic Seizure Detection via Multi-Space Alignment
Dec 18, 2024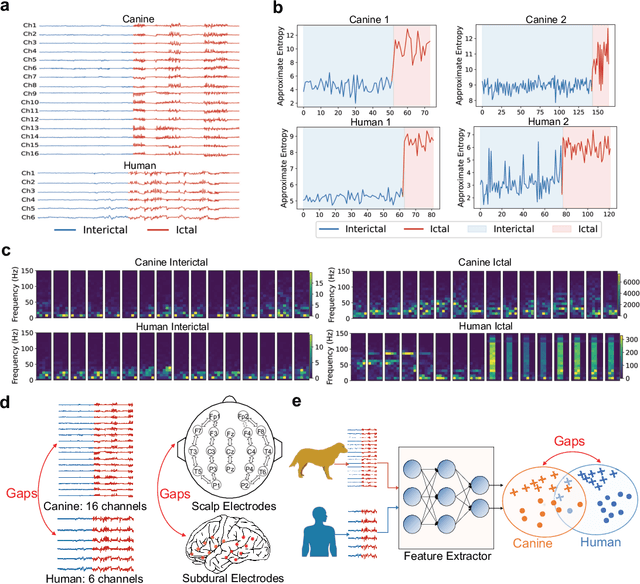
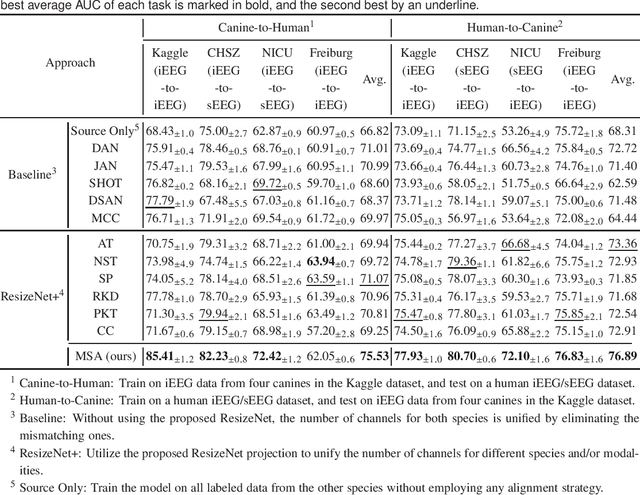

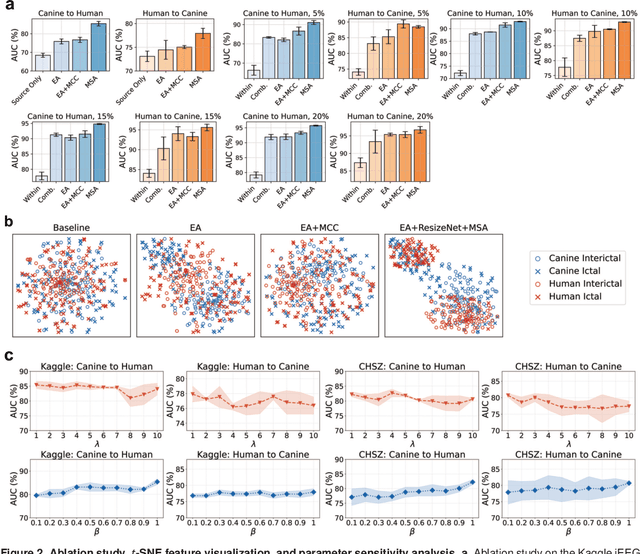
Epilepsy significantly impacts global health, affecting about 65 million people worldwide, along with various animal species. The diagnostic processes of epilepsy are often hindered by the transient and unpredictable nature of seizures. Here we propose a multi-space alignment approach based on cross-species and cross-modality electroencephalogram (EEG) data to enhance the detection capabilities and understanding of epileptic seizures. By employing deep learning techniques, including domain adaptation and knowledge distillation, our framework aligns cross-species and cross-modality EEG signals to enhance the detection capability beyond traditional within-species and with-modality models. Experiments on multiple surface and intracranial EEG datasets of humans and canines demonstrated substantial improvements in the detection accuracy, achieving over 90% AUC scores for cross-species and cross-modality seizure detection with extremely limited labeled data from the target species/modality. To our knowledge, this is the first study that demonstrates the effectiveness of integrating heterogeneous data from different species and modalities to improve EEG-based seizure detection performance. The approach may also be generalizable to different brain-computer interface paradigms, and suggests the possibility to combine data from different species/modalities to increase the amount of training data for large EEG models.
GNCformer Enhanced Self-attention for Automatic Speech Recognition
May 22, 2023
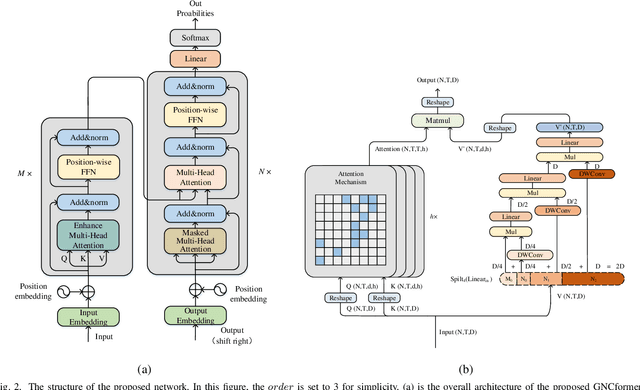
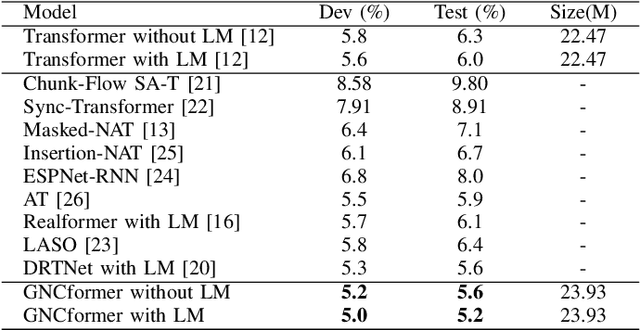
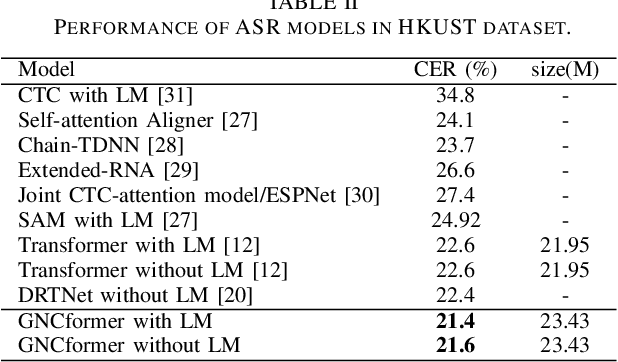
In this paper,an Enhanced Self-Attention (ESA) mechanism has been put forward for robust feature extraction.The proposed ESA is integrated with the recursive gated convolution and self-attention mechanism.In particular, the former is used to capture multi-order feature interaction and the latter is for global feature extraction.In addition, the location of interest that is suitable for inserting the ESA is also worth being explored.In this paper, the ESA is embedded into the encoder layer of the Transformer network for automatic speech recognition (ASR) tasks, and this newly proposed model is named GNCformer. The effectiveness of the GNCformer has been validated using two datasets, that are Aishell-1 and HKUST.Experimental results show that, compared with the Transformer network,0.8%CER,and 1.2%CER improvement for these two mentioned datasets, respectively, can be achieved.It is worth mentioning that only 1.4M additional parameters have been involved in our proposed GNCformer.
Generative Adversarial Networks for Scintillation Signal Simulation in EXO-200
Mar 11, 2023Generative Adversarial Networks trained on samples of simulated or actual events have been proposed as a way of generating large simulated datasets at a reduced computational cost. In this work, a novel approach to perform the simulation of photodetector signals from the time projection chamber of the EXO-200 experiment is demonstrated. The method is based on a Wasserstein Generative Adversarial Network - a deep learning technique allowing for implicit non-parametric estimation of the population distribution for a given set of objects. Our network is trained on real calibration data using raw scintillation waveforms as input. We find that it is able to produce high-quality simulated waveforms an order of magnitude faster than the traditional simulation approach and, importantly, generalize from the training sample and discern salient high-level features of the data. In particular, the network correctly deduces position dependency of scintillation light response in the detector and correctly recognizes dead photodetector channels. The network output is then integrated into the EXO-200 analysis framework to show that the standard EXO-200 reconstruction routine processes the simulated waveforms to produce energy distributions comparable to that of real waveforms. Finally, the remaining discrepancies and potential ways to improve the approach further are highlighted.
Compressed Sensing with Probability-based Prior Information
Oct 27, 2019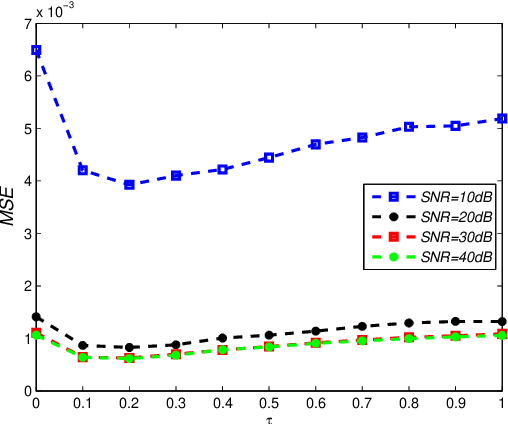
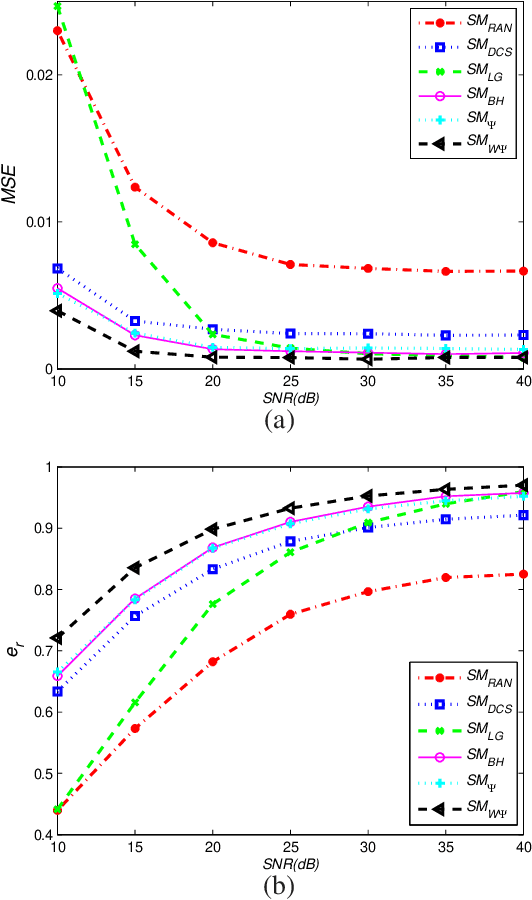
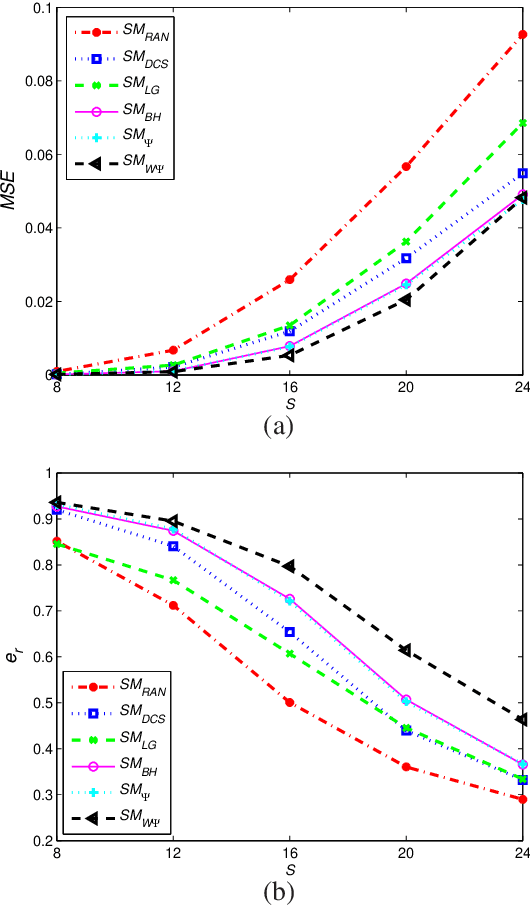
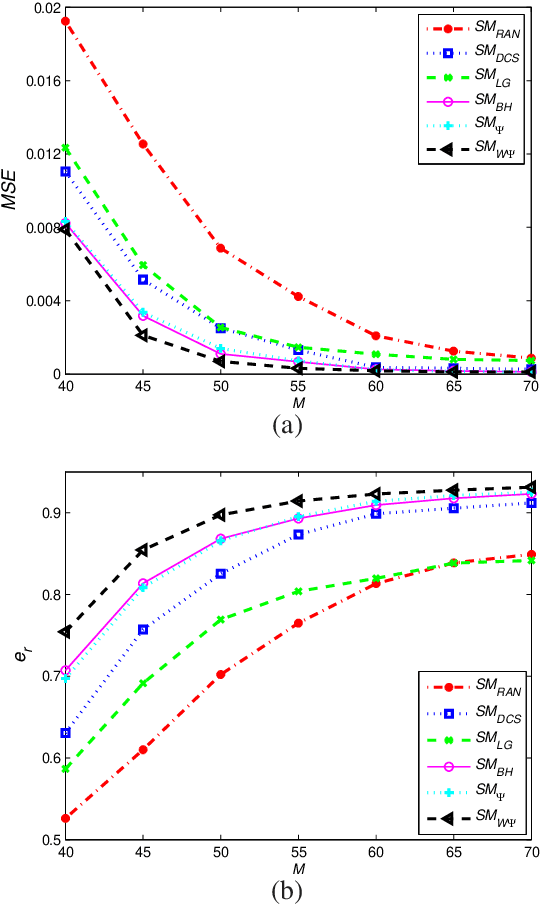
This paper deals with the design of a sensing matrix along with a sparse recovery algorithm by utilizing the probability-based prior information for compressed sensing system. With the knowledge of the probability for each atom of the dictionary being used, a diagonal weighted matrix is obtained and then the sensing matrix is designed by minimizing a weighted function such that the Gram of the equivalent dictionary is as close to the Gram of dictionary as possible. An analytical solution for the corresponding sensing matrix is derived which leads to low computational complexity. We also exploit this prior information through the sparse recovery stage and propose a probability-driven orthogonal matching pursuit algorithm that improves the accuracy of the recovery. Simulations for synthetic data and application scenarios of surveillance video are carried out to compare the performance of the proposed methods with some existing algorithms. The results reveal that the proposed CS system outperforms existing CS systems.
Autonomous drone race: A computationally efficient vision-based navigation and control strategy
Sep 16, 2018
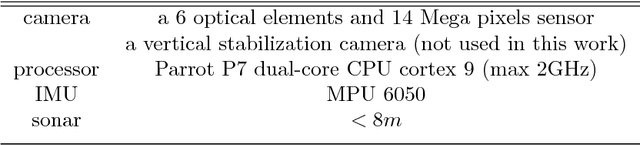
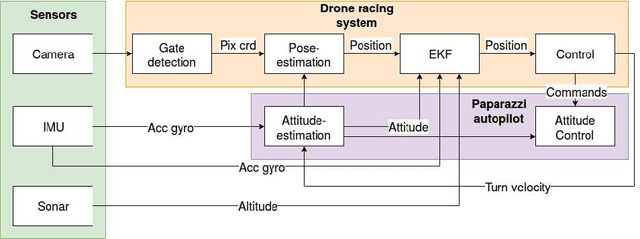

Drone racing is becoming a popular sport where human pilots have to control their drones to fly at high speed through complex environments and pass a number of gates in a pre-defined sequence. In this paper, we develop an autonomous system for drones to race fully autonomously using only onboard resources. Instead of commonly used visual navigation methods, such as simultaneous localization and mapping and visual inertial odometry, which are computationally expensive for micro aerial vehicles (MAVs), we developed the highly efficient snake gate detection algorithm for visual navigation, which can detect the gate at 20HZ on a Parrot Bebop drone. Then, with the gate detection result, we developed a robust pose estimation algorithm which has better tolerance to detection noise than a state-of-the-art perspective-n-point method. During the race, sometimes the gates are not in the drone's field of view. For this case, a state prediction-based feed-forward control strategy is developed to steer the drone to fly to the next gate. Experiments show that the drone can fly a half-circle with 1.5m radius within 2 seconds with only 30cm error at the end of the circle without any position feedback. Finally, the whole system is tested in a complex environment (a showroom in the faculty of Aerospace Engineering, TU Delft). The result shows that the drone can complete the track of 15 gates with a speed of 1.5m/s which is faster than the speeds exhibited at the 2016 and 2017 IROS autonomous drone races.