 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMLOW: Interpretable Low-Rank Frequency Magnitude Decomposition of Multiple Effects for Time Series Forecasting
Mar 19, 2026Separating multiple effects in time series is fundamental yet challenging for time-series forecasting (TSF). However, existing TSF models cannot effectively learn interpretable multi-effect decomposition by their smoothing-based temporal techniques. Here, a new interpretable frequency-based decomposition pipeline MLOW captures the insight: a time series can be represented as a magnitude spectrum multiplied by the corresponding phase-aware basis functions, and the magnitude spectrum distribution of a time series always exhibits observable patterns for different effects. MLOW learns a low-rank representation of the magnitude spectrum to capture dominant trending and seasonal effects. We explore low-rank methods, including PCA, NMF, and Semi-NMF, and find that none can simultaneously achieve interpretable, efficient and generalizable decomposition. Thus, we propose hyperplane-nonnegative matrix factorization (Hyperplane-NMF). Further, to address the frequency (spectral) leakage restricting high-quality low-rank decomposition, MLOW enables a flexible selection of input horizons and frequency levels via a mathematical mechanism. Visual analysis demonstrates that MLOW enables interpretable and hierarchical multiple-effect decomposition, robust to noises. It can also enable plug-and-play in existing TSF backbones with remarkable performance improvement but minimal architectural modifications.
Fore-Mamba3D: Mamba-based Foreground-Enhanced Encoding for 3D Object Detection
Feb 23, 2026Linear modeling methods like Mamba have been merged as the effective backbone for the 3D object detection task. However, previous Mamba-based methods utilize the bidirectional encoding for the whole non-empty voxel sequence, which contains abundant useless background information in the scenes. Though directly encoding foreground voxels appears to be a plausible solution, it tends to degrade detection performance. We attribute this to the response attenuation and restricted context representation in the linear modeling for fore-only sequences. To address this problem, we propose a novel backbone, termed Fore-Mamba3D, to focus on the foreground enhancement by modifying Mamba-based encoder. The foreground voxels are first sampled according to the predicted scores. Considering the response attenuation existing in the interaction of foreground voxels across different instances, we design a regional-to-global slide window (RGSW) to propagate the information from regional split to the entire sequence. Furthermore, a semantic-assisted and state spatial fusion module (SASFMamba) is proposed to enrich contextual representation by enhancing semantic and geometric awareness within the Mamba model. Our method emphasizes foreground-only encoding and alleviates the distance-based and causal dependencies in the linear autoregression model. The superior performance across various benchmarks demonstrates the effectiveness of Fore-Mamba3D in the 3D object detection task.
X2C: A Dataset Featuring Nuanced Facial Expressions for Realistic Humanoid Imitation
May 16, 2025The ability to imitate realistic facial expressions is essential for humanoid robots engaged in affective human-robot communication. However, the lack of datasets containing diverse humanoid facial expressions with proper annotations hinders progress in realistic humanoid facial expression imitation. To address these challenges, we introduce X2C (Anything to Control), a dataset featuring nuanced facial expressions for realistic humanoid imitation. With X2C, we contribute: 1) a high-quality, high-diversity, large-scale dataset comprising 100,000 (image, control value) pairs. Each image depicts a humanoid robot displaying a diverse range of facial expressions, annotated with 30 control values representing the ground-truth expression configuration; 2) X2CNet, a novel human-to-humanoid facial expression imitation framework that learns the correspondence between nuanced humanoid expressions and their underlying control values from X2C. It enables facial expression imitation in the wild for different human performers, providing a baseline for the imitation task, showcasing the potential value of our dataset; 3) real-world demonstrations on a physical humanoid robot, highlighting its capability to advance realistic humanoid facial expression imitation. Code and Data: https://lipzh5.github.io/X2CNet/
UGotMe: An Embodied System for Affective Human-Robot Interaction
Oct 24, 2024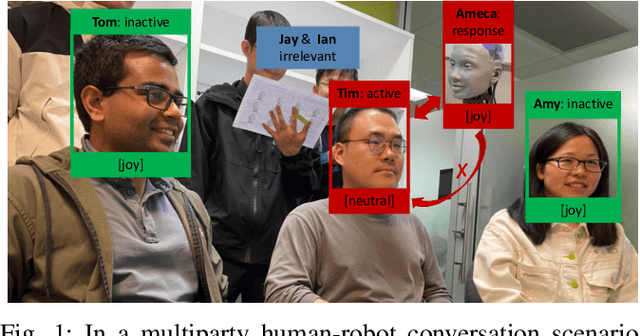
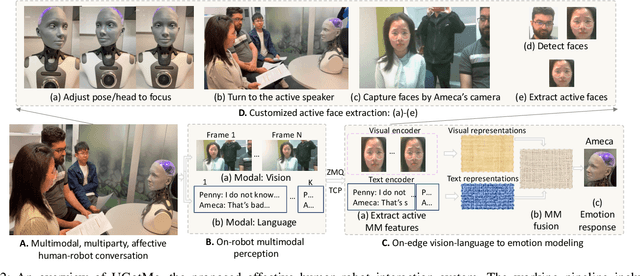


Equipping humanoid robots with the capability to understand emotional states of human interactants and express emotions appropriately according to situations is essential for affective human-robot interaction. However, enabling current vision-aware multimodal emotion recognition models for affective human-robot interaction in the real-world raises embodiment challenges: addressing the environmental noise issue and meeting real-time requirements. First, in multiparty conversation scenarios, the noises inherited in the visual observation of the robot, which may come from either 1) distracting objects in the scene or 2) inactive speakers appearing in the field of view of the robot, hinder the models from extracting emotional cues from vision inputs. Secondly, realtime response, a desired feature for an interactive system, is also challenging to achieve. To tackle both challenges, we introduce an affective human-robot interaction system called UGotMe designed specifically for multiparty conversations. Two denoising strategies are proposed and incorporated into the system to solve the first issue. Specifically, to filter out distracting objects in the scene, we propose extracting face images of the speakers from the raw images and introduce a customized active face extraction strategy to rule out inactive speakers. As for the second issue, we employ efficient data transmission from the robot to the local server to improve realtime response capability. We deploy UGotMe on a human robot named Ameca to validate its real-time inference capabilities in practical scenarios. Videos demonstrating real-world deployment are available at https://pi3-141592653.github.io/UGotMe/.
Semi-Supervised Clustering via Structural Entropy with Different Constraints
Dec 18, 2023



Semi-supervised clustering techniques have emerged as valuable tools for leveraging prior information in the form of constraints to improve the quality of clustering outcomes. Despite the proliferation of such methods, the ability to seamlessly integrate various types of constraints remains limited. While structural entropy has proven to be a powerful clustering approach with wide-ranging applications, it has lacked a variant capable of accommodating these constraints. In this work, we present Semi-supervised clustering via Structural Entropy (SSE), a novel method that can incorporate different types of constraints from diverse sources to perform both partitioning and hierarchical clustering. Specifically, we formulate a uniform view for the commonly used pairwise and label constraints for both types of clustering. Then, we design objectives that incorporate these constraints into structural entropy and develop tailored algorithms for their optimization. We evaluate SSE on nine clustering datasets and compare it with eleven semi-supervised partitioning and hierarchical clustering methods. Experimental results demonstrate the superiority of SSE on clustering accuracy with different types of constraints. Additionally, the functionality of SSE for biological data analysis is demonstrated by cell clustering experiments conducted on four single-cell RNAseq datasets.