 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUGotMe: An Embodied System for Affective Human-Robot Interaction
Paper and Code
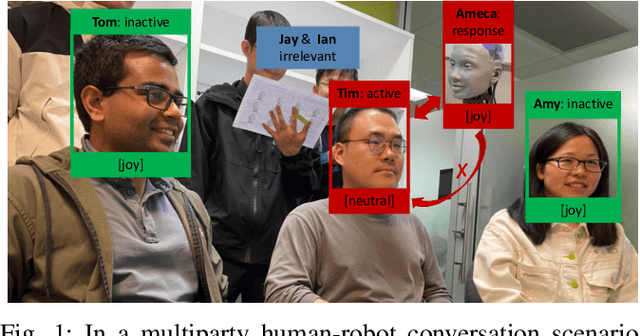
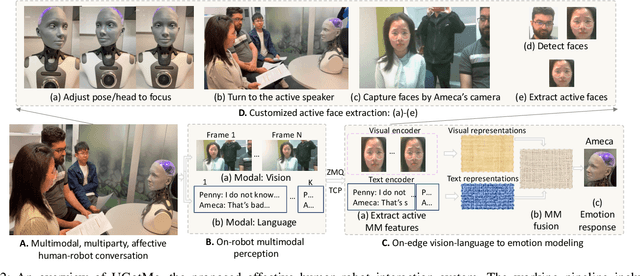


Equipping humanoid robots with the capability to understand emotional states of human interactants and express emotions appropriately according to situations is essential for affective human-robot interaction. However, enabling current vision-aware multimodal emotion recognition models for affective human-robot interaction in the real-world raises embodiment challenges: addressing the environmental noise issue and meeting real-time requirements. First, in multiparty conversation scenarios, the noises inherited in the visual observation of the robot, which may come from either 1) distracting objects in the scene or 2) inactive speakers appearing in the field of view of the robot, hinder the models from extracting emotional cues from vision inputs. Secondly, realtime response, a desired feature for an interactive system, is also challenging to achieve. To tackle both challenges, we introduce an affective human-robot interaction system called UGotMe designed specifically for multiparty conversations. Two denoising strategies are proposed and incorporated into the system to solve the first issue. Specifically, to filter out distracting objects in the scene, we propose extracting face images of the speakers from the raw images and introduce a customized active face extraction strategy to rule out inactive speakers. As for the second issue, we employ efficient data transmission from the robot to the local server to improve realtime response capability. We deploy UGotMe on a human robot named Ameca to validate its real-time inference capabilities in practical scenarios. Videos demonstrating real-world deployment are available at https://pi3-141592653.github.io/UGotMe/.