 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsistent Semantic Attacks on Optical Flow
Nov 16, 2021
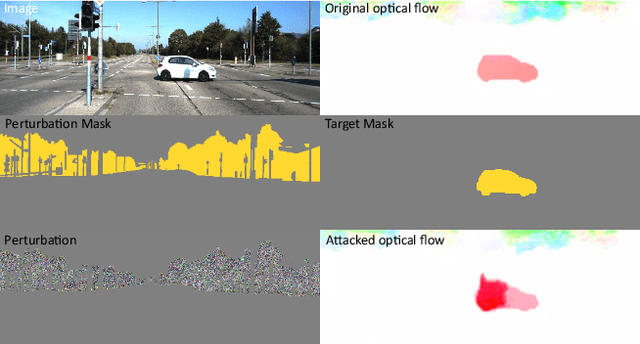
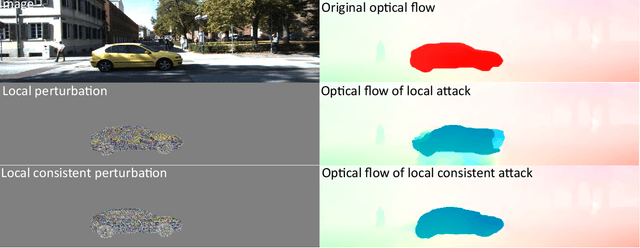
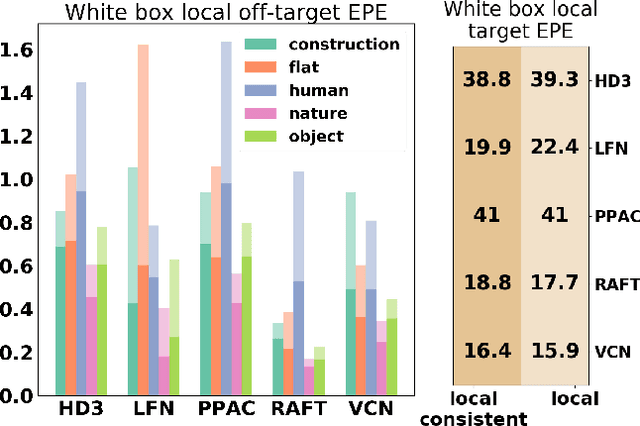
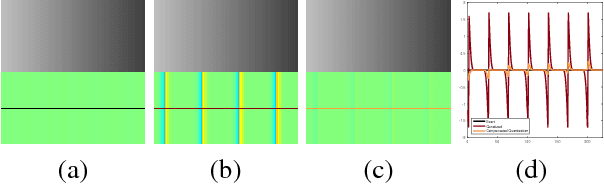
We present a novel approach for semantically targeted adversarial attacks on Optical Flow. In such attacks the goal is to corrupt the flow predictions of a specific object category or instance. Usually, an attacker seeks to hide the adversarial perturbations in the input. However, a quick scan of the output reveals the attack. In contrast, our method helps to hide the attackers intent in the output as well. We achieve this thanks to a regularization term that encourages off-target consistency. We perform extensive tests on leading optical flow models to demonstrate the benefits of our approach in both white-box and black-box settings. Also, we demonstrate the effectiveness of our attack on subsequent tasks that depend on the optical flow.
You Better Look Twice: a new perspective for designing accurate detectors with reduced computations
Aug 03, 2021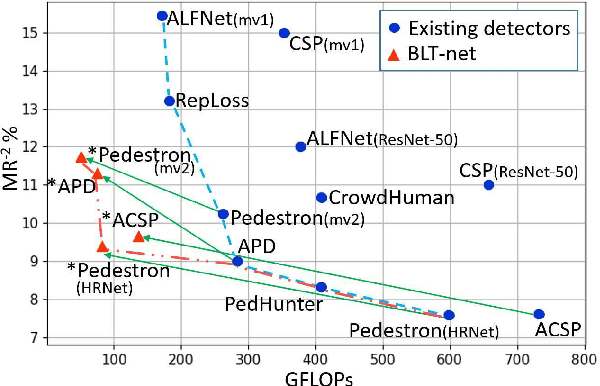
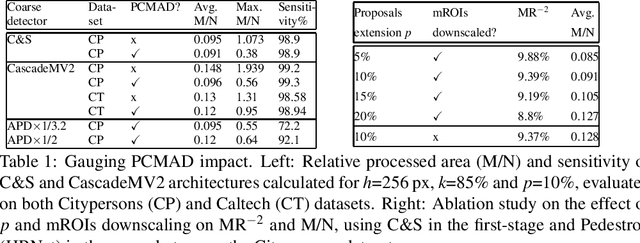
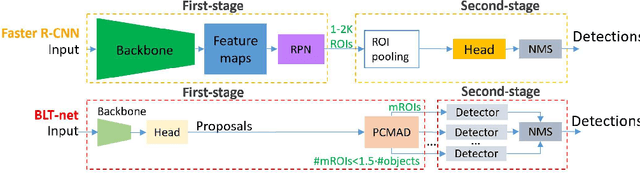
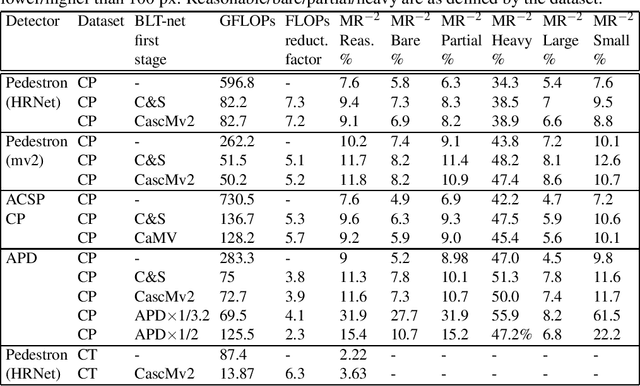
General object detectors use powerful backbones that uniformly extract features from images for enabling detection of a vast amount of object types. However, utilization of such backbones in object detection applications developed for specific object types can unnecessarily over-process an extensive amount of background. In addition, they are agnostic to object scales, thus redundantly process all image regions at the same resolution. In this work we introduce BLT-net, a new low-computation two-stage object detection architecture designed to process images with a significant amount of background and objects of variate scales. BLT-net reduces computations by separating objects from background using a very lite first-stage. BLT-net then efficiently merges obtained proposals to further decrease processed background and then dynamically reduces their resolution to minimize computations. Resulting image proposals are then processed in the second-stage by a highly accurate model. We demonstrate our architecture on the pedestrian detection problem, where objects are of different sizes, images are of high resolution and object detection is required to run in real-time. We show that our design reduces computations by a factor of x4-x7 on the Citypersons and Caltech datasets with respect to leading pedestrian detectors, on account of a small accuracy degradation. This method can be applied on other object detection applications in scenes with a considerable amount of background and variate object sizes to reduce computations.
Co-occurrence Filter
Dec 24, 2017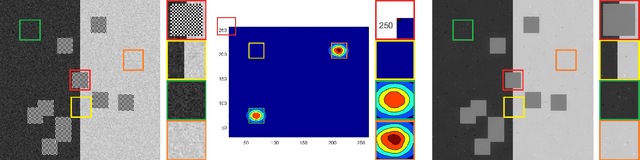


Co-occurrence Filter (CoF) is a boundary preserving filter. It is based on the Bilateral Filter (BF) but instead of using a Gaussian on the range values to preserve edges it relies on a co-occurrence matrix. Pixel values that co-occur frequently in the image (i.e., inside textured regions) will have a high weight in the co-occurrence matrix. This, in turn, means that such pixel pairs will be averaged and hence smoothed, regardless of their intensity differences. On the other hand, pixel values that rarely co-occur (i.e., across texture boundaries) will have a low weight in the co-occurrence matrix. As a result, they will not be averaged and the boundary between them will be preserved. The CoF therefore extends the BF to deal with boundaries, not just edges. It learns co-occurrences directly from the image. We can achieve various filtering results by directing it to learn the co-occurrence matrix from a part of the image, or a different image. We give the definition of the filter, discuss how to use it with color images and show several use cases.