 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Graph Neural Network to Model User Comfort in Robot Navigation
Feb 17, 2021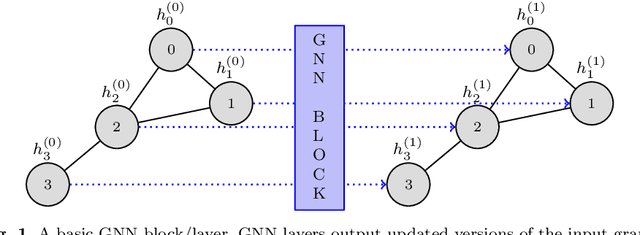
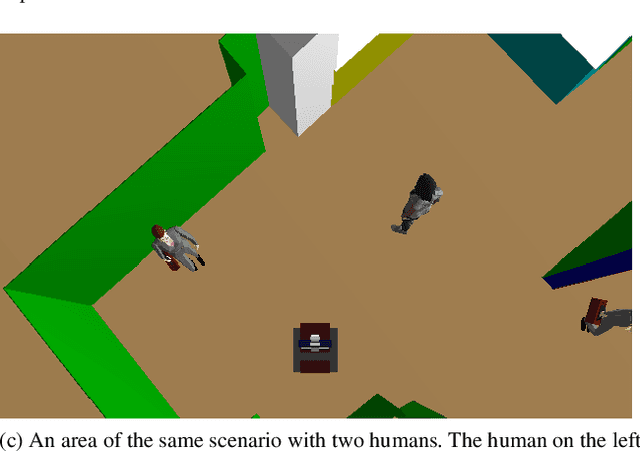
Autonomous navigation is a key skill for assistive and service robots. To be successful, robots have to minimise the disruption caused to humans while moving. This implies predicting how people will move and complying with social conventions. Avoiding disrupting personal spaces, people's paths and interactions are examples of these social conventions. This paper leverages Graph Neural Networks to model robot disruption considering the movement of the humans and the robot so that the model built can be used by path planning algorithms. Along with the model, this paper presents an evolution of the dataset SocNav1 which considers the movement of the robot and the humans, and an updated scenario-to-graph transformation which is tested using different Graph Neural Network blocks. The model trained achieves close-to-human performance in the dataset. In addition to its accuracy, the main advantage of the approach is its scalability in terms of the number of social factors that can be considered in comparison with handcrafted models.
A Toolkit to Generate Social Navigation Datasets
Sep 11, 2020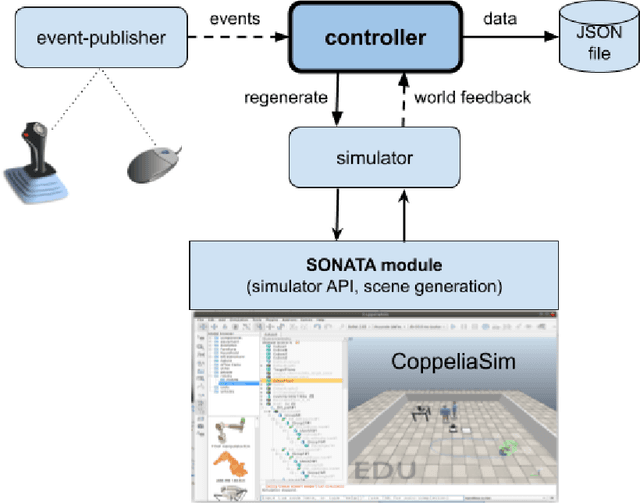

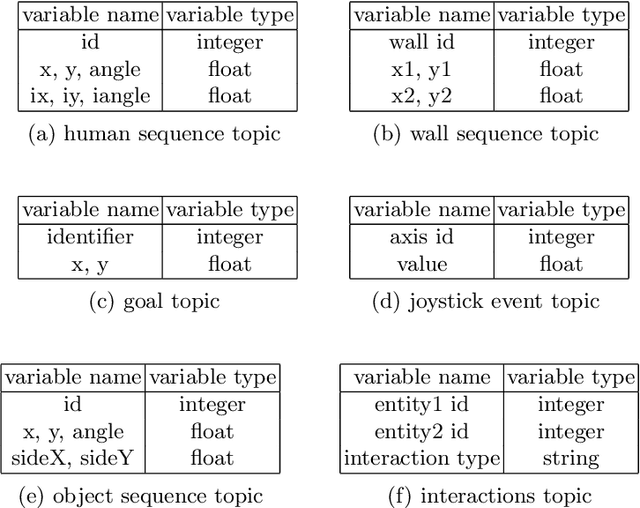
Social navigation datasets are necessary to assess social navigation algorithms and train machine learning algorithms. Most of the currently available datasets target pedestrians' movements as a pattern to be replicated by robots. It can be argued that one of the main reasons for this to happen is that compiling datasets where real robots are manually controlled, as they would be expected to behave when moving, is a very resource-intensive task. Another aspect that is often missing in datasets is symbolic information that could be relevant, such as human activities, relationships or interactions. Unfortunately, the available datasets targeting robots and supporting symbolic information are restricted to static scenes. This paper argues that simulation can be used to gather social navigation data in an effective and cost-efficient way and presents a toolkit for this purpose. A use case studying the application of graph neural networks to create learned control policies using supervised learning is presented as an example of how it can be used.
Graph Neural Networks for Human-aware Social Navigation
Sep 19, 2019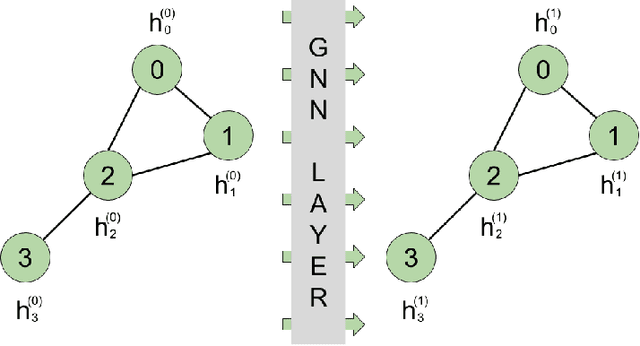
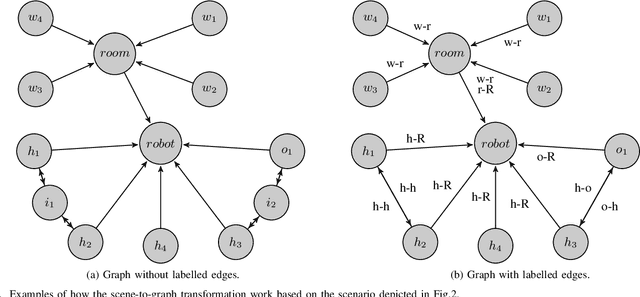
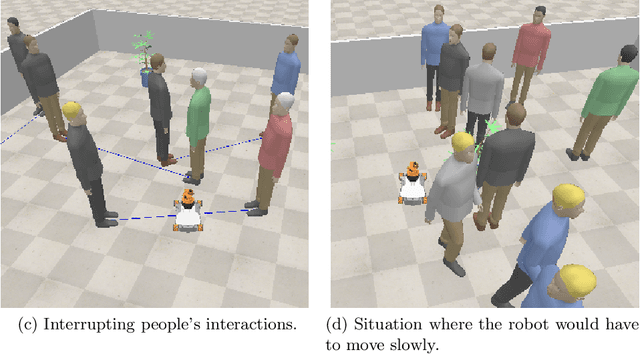
Autonomous navigation is a key skill for assistive and service robots. To be successful, robots have to navigate avoiding going through the personal spaces of the people surrounding them. Complying with social rules such as not getting in the middle of human-to-human and human-to-object interactions is also important. This paper suggests using Graph Neural Networks to model how inconvenient the presence of a robot would be in a particular scenario according to learned human conventions so that it can be used by path planning algorithms. To do so, we propose two ways of modelling social interactions using graphs and benchmark them with different Graph Neural Networks using the SocNav1 dataset. We achieve close-to-human performance in the dataset and argue that, in addition to promising results, the main advantage of the approach is its scalability in terms of the number of social factors that can be considered and easily embedded in code, in comparison with model-based approaches. The code used to train and test the resulting graph neural network is available in a public repository.