 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeronymNet: A Hierarchical Approach for Unified and Controllable Multi-Category Object Generation
Oct 17, 2021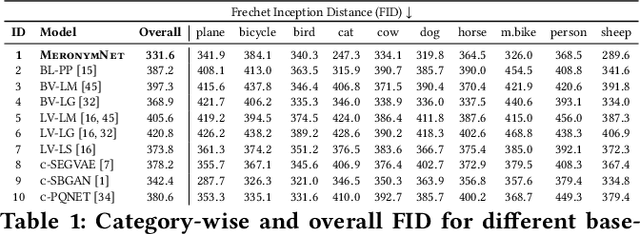
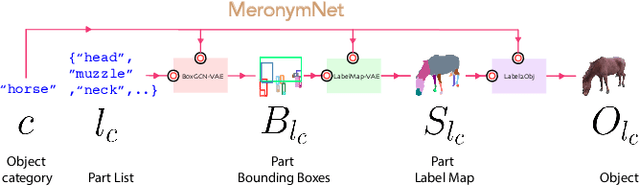
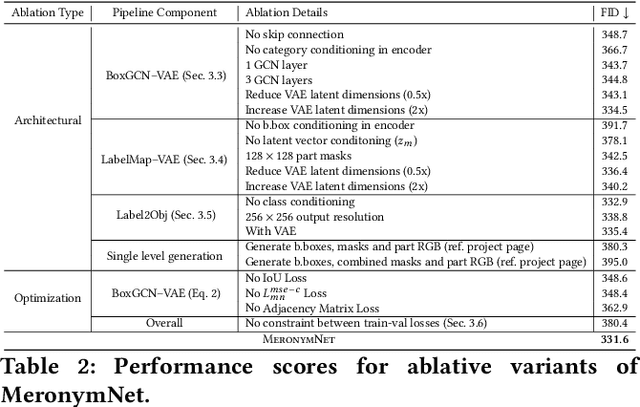
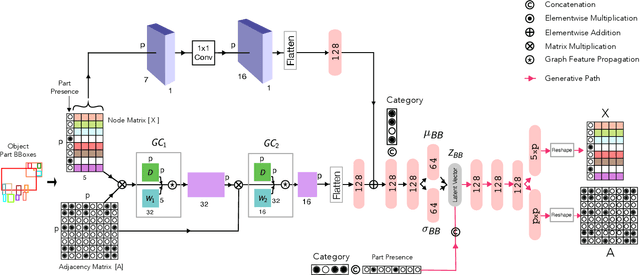
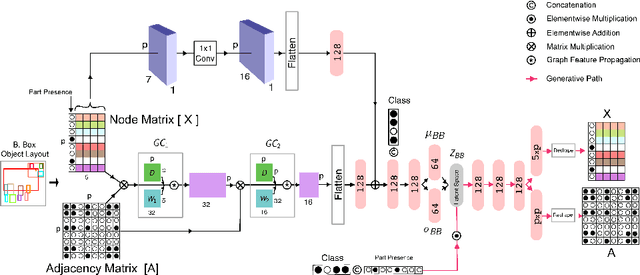
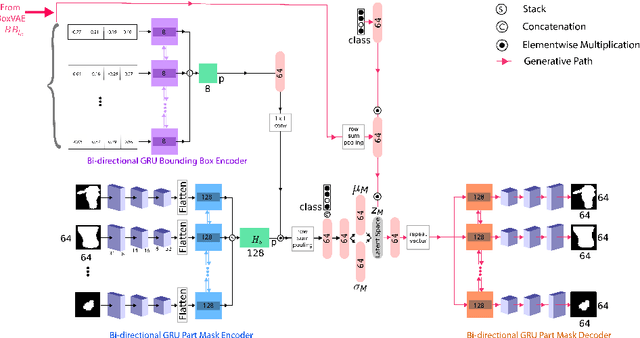
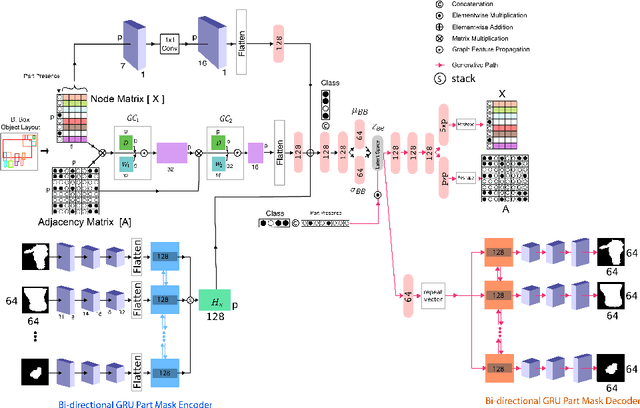
We introduce MeronymNet, a novel hierarchical approach for controllable, part-based generation of multi-category objects using a single unified model. We adopt a guided coarse-to-fine strategy involving semantically conditioned generation of bounding box layouts, pixel-level part layouts and ultimately, the object depictions themselves. We use Graph Convolutional Networks, Deep Recurrent Networks along with custom-designed Conditional Variational Autoencoders to enable flexible, diverse and category-aware generation of 2-D objects in a controlled manner. The performance scores for generated objects reflect MeronymNet's superior performance compared to multiple strong baselines and ablative variants. We also showcase MeronymNet's suitability for controllable object generation and interactive object editing at various levels of structural and semantic granularity.
A Toolkit to Generate Social Navigation Datasets
Sep 11, 2020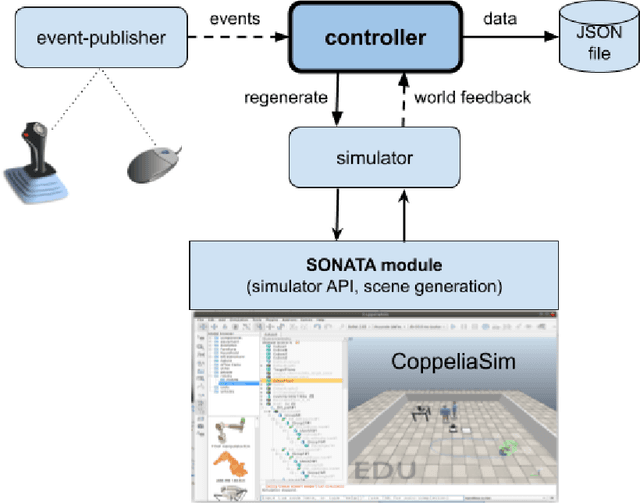

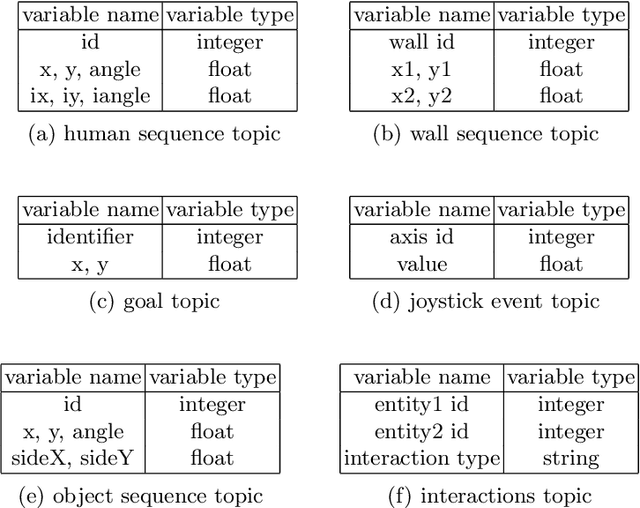
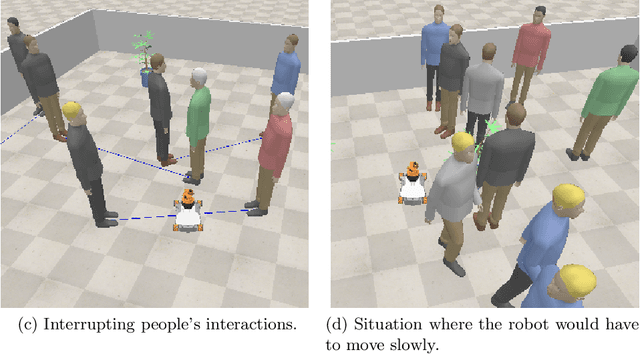
Social navigation datasets are necessary to assess social navigation algorithms and train machine learning algorithms. Most of the currently available datasets target pedestrians' movements as a pattern to be replicated by robots. It can be argued that one of the main reasons for this to happen is that compiling datasets where real robots are manually controlled, as they would be expected to behave when moving, is a very resource-intensive task. Another aspect that is often missing in datasets is symbolic information that could be relevant, such as human activities, relationships or interactions. Unfortunately, the available datasets targeting robots and supporting symbolic information are restricted to static scenes. This paper argues that simulation can be used to gather social navigation data in an effective and cost-efficient way and presents a toolkit for this purpose. A use case studying the application of graph neural networks to create learned control policies using supervised learning is presented as an example of how it can be used.
OPAL-Net: A Generative Model for Part-based Object Layout Generation
May 30, 2020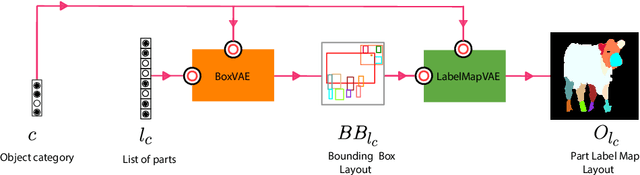
We propose OPAL-Net, a novel hierarchical architecture for part-based layout generation of objects from multiple categories using a single unified model. We adopt a coarse-to-fine strategy involving semantically conditioned autoregressive generation of bounding box layouts and pixel-level part layouts for objects. We use Graph Convolutional Networks, Deep Recurrent Networks along with custom-designed Conditional Variational Autoencoders to enable flexible, diverse and category-aware generation of object layouts. We train OPAL-Net on PASCAL-Parts dataset. The generated samples and corresponding evaluation scores demonstrate the versatility of OPAL-Net compared to ablative variants and baselines.