 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuessing human intentions to avoid dangerous situations in caregiving robots
Mar 26, 2024For robots to interact socially, they must interpret human intentions and anticipate their potential outcomes accurately. This is particularly important for social robots designed for human care, which may face potentially dangerous situations for people, such as unseen obstacles in their way, that should be avoided. This paper explores the Artificial Theory of Mind (ATM) approach to inferring and interpreting human intentions. We propose an algorithm that detects risky situations for humans, selecting a robot action that removes the danger in real time. We use the simulation-based approach to ATM and adopt the 'like-me' policy to assign intentions and actions to people. Using this strategy, the robot can detect and act with a high rate of success under time-constrained situations. The algorithm has been implemented as part of an existing robotics cognitive architecture and tested in simulation scenarios. Three experiments have been conducted to test the implementation's robustness, precision and real-time response, including a simulated scenario, a human-in-the-loop hybrid configuration and a real-world scenario.
A Graph Neural Network to Model User Comfort in Robot Navigation
Feb 17, 2021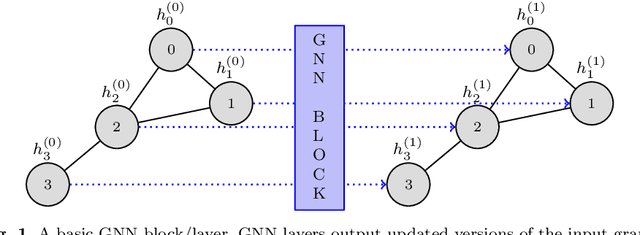
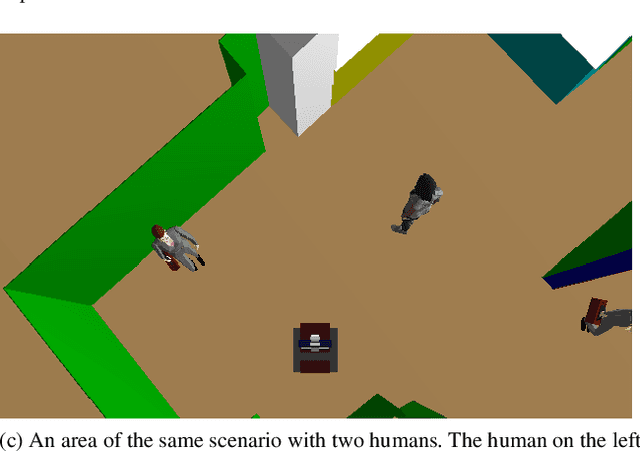
Autonomous navigation is a key skill for assistive and service robots. To be successful, robots have to minimise the disruption caused to humans while moving. This implies predicting how people will move and complying with social conventions. Avoiding disrupting personal spaces, people's paths and interactions are examples of these social conventions. This paper leverages Graph Neural Networks to model robot disruption considering the movement of the humans and the robot so that the model built can be used by path planning algorithms. Along with the model, this paper presents an evolution of the dataset SocNav1 which considers the movement of the robot and the humans, and an updated scenario-to-graph transformation which is tested using different Graph Neural Network blocks. The model trained achieves close-to-human performance in the dataset. In addition to its accuracy, the main advantage of the approach is its scalability in terms of the number of social factors that can be considered in comparison with handcrafted models.
Multi-camera Torso Pose Estimation using Graph Neural Networks
Jul 28, 2020
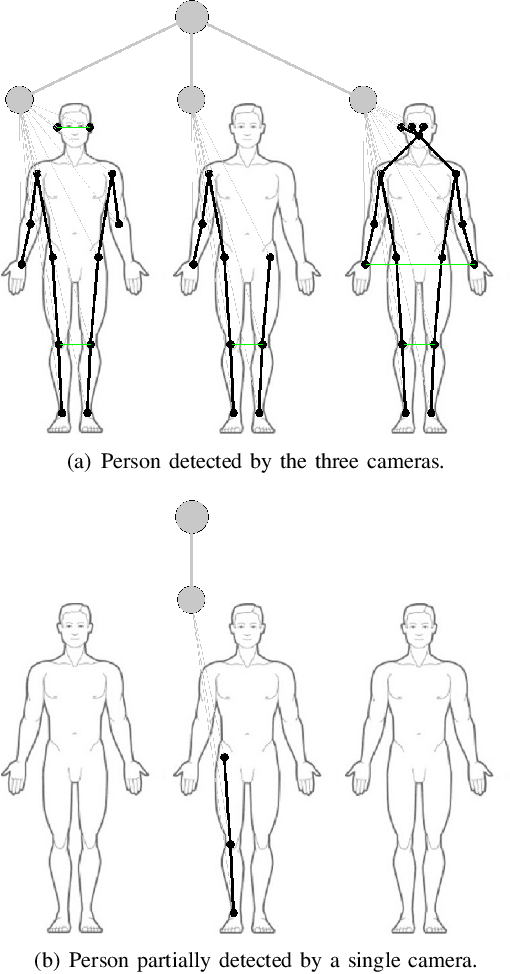
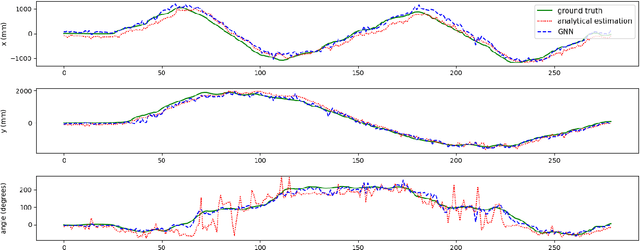
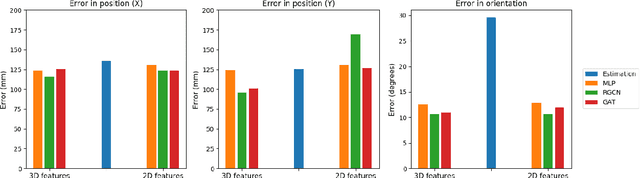
Estimating the location and orientation of humans is an essential skill for service and assistive robots. To achieve a reliable estimation in a wide area such as an apartment, multiple RGBD cameras are frequently used. Firstly, these setups are relatively expensive. Secondly, they seldom perform an effective data fusion using the multiple camera sources at an early stage of the processing pipeline. Occlusions and partial views make this second point very relevant in these scenarios. The proposal presented in this paper makes use of graph neural networks to merge the information acquired from multiple camera sources, achieving a mean absolute error below 125 mm for the location and 10 degrees for the orientation using low-resolution RGB images. The experiments, conducted in an apartment with three cameras, benchmarked two different graph neural network implementations and a third architecture based on fully connected layers. The software used has been released as open-source in a public repository (https://github.com/vangiel/WheresTheFellow).
Graph Neural Networks for Human-aware Social Navigation
Sep 19, 2019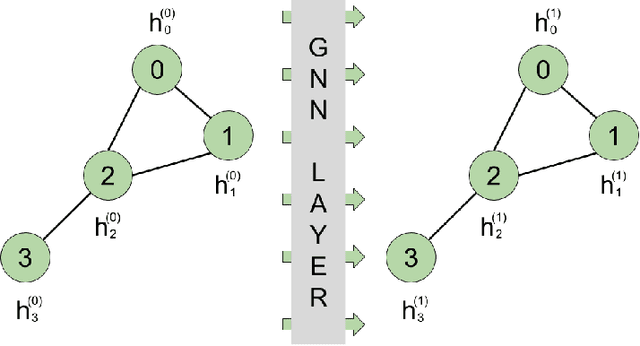
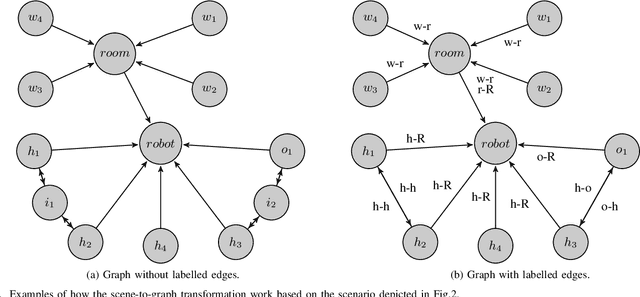
Autonomous navigation is a key skill for assistive and service robots. To be successful, robots have to navigate avoiding going through the personal spaces of the people surrounding them. Complying with social rules such as not getting in the middle of human-to-human and human-to-object interactions is also important. This paper suggests using Graph Neural Networks to model how inconvenient the presence of a robot would be in a particular scenario according to learned human conventions so that it can be used by path planning algorithms. To do so, we propose two ways of modelling social interactions using graphs and benchmark them with different Graph Neural Networks using the SocNav1 dataset. We achieve close-to-human performance in the dataset and argue that, in addition to promising results, the main advantage of the approach is its scalability in terms of the number of social factors that can be considered and easily embedded in code, in comparison with model-based approaches. The code used to train and test the resulting graph neural network is available in a public repository.