 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePKU-DyMVHumans: A Multi-View Video Benchmark for High-Fidelity Dynamic Human Modeling
Apr 02, 2024High-quality human reconstruction and photo-realistic rendering of a dynamic scene is a long-standing problem in computer vision and graphics. Despite considerable efforts invested in developing various capture systems and reconstruction algorithms, recent advancements still struggle with loose or oversized clothing and overly complex poses. In part, this is due to the challenges of acquiring high-quality human datasets. To facilitate the development of these fields, in this paper, we present PKU-DyMVHumans, a versatile human-centric dataset for high-fidelity reconstruction and rendering of dynamic human scenarios from dense multi-view videos. It comprises 8.2 million frames captured by more than 56 synchronized cameras across diverse scenarios. These sequences comprise 32 human subjects across 45 different scenarios, each with a high-detailed appearance and realistic human motion. Inspired by recent advancements in neural radiance field (NeRF)-based scene representations, we carefully set up an off-the-shelf framework that is easy to provide those state-of-the-art NeRF-based implementations and benchmark on PKU-DyMVHumans dataset. It is paving the way for various applications like fine-grained foreground/background decomposition, high-quality human reconstruction and photo-realistic novel view synthesis of a dynamic scene. Extensive studies are performed on the benchmark, demonstrating new observations and challenges that emerge from using such high-fidelity dynamic data.
A Transfer Learning-Based Approach to Marine Vessel Re-Identification
Jul 29, 2022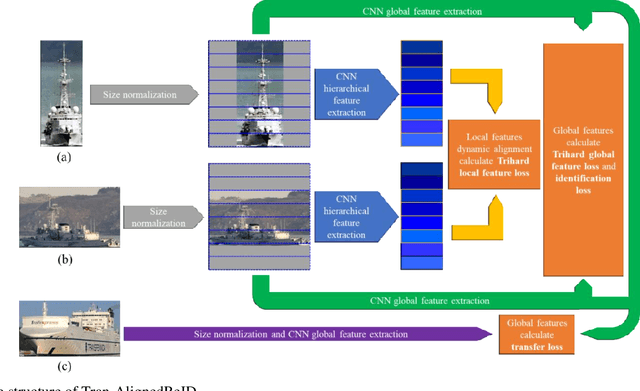


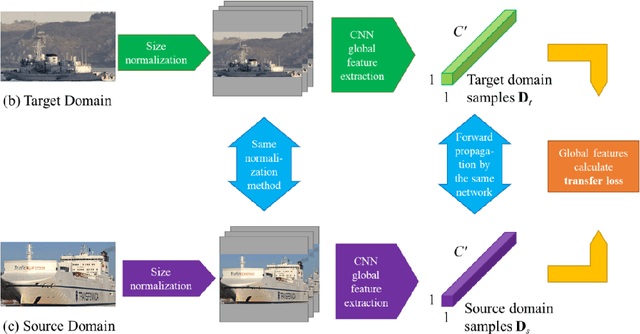
Marine vessel re-identification technology is an important component of intelligent shipping systems and an important part of the visual perception tasks required for marine surveillance. However, unlike the situation on land, the maritime environment is complex and variable with fewer samples, and it is more difficult to perform vessel re-identification at sea. Therefore, this paper proposes a transfer dynamic alignment algorithm and simulates the swaying situation of vessels at sea, using a well-camouflaged and similar warship as the test target to improve the recognition difficulty and thus cope with the impact caused by complex sea conditions, and discusses the effect of different types of vessels as transfer objects. The experimental results show that the improved algorithm improves the mean average accuracy (mAP) by 10.2% and the first hit rate (Rank1) by 4.9% on average.
Rethinking Depth Estimation for Multi-View Stereo: A Unified Representation and Focal Loss
Jan 05, 2022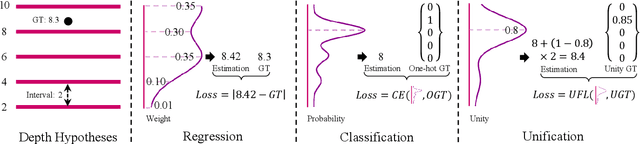



Depth estimation is solved as a regression or classification problem in existing learning-based multi-view stereo methods. Although these two representations have recently demonstrated their excellent performance, they still have apparent shortcomings, e.g., regression methods tend to overfit due to the indirect learning cost volume, and classification methods cannot directly infer the exact depth due to its discrete prediction. In this paper, we propose a novel representation, termed Unification, to unify the advantages of regression and classification. It can directly constrain the cost volume like classification methods, but also realize the sub-pixel depth prediction like regression methods. To excavate the potential of unification, we design a new loss function named Unified Focal Loss, which is more uniform and reasonable to combat the challenge of sample imbalance. Combining these two unburdened modules, we present a coarse-to-fine framework, that we call UniMVSNet. The results of ranking first on both DTU and Tanks and Temples benchmarks verify that our model not only performs the best but also has the best generalization ability.
Research on Mosaic Image Data Enhancement for Overlapping Ship Targets
May 11, 2021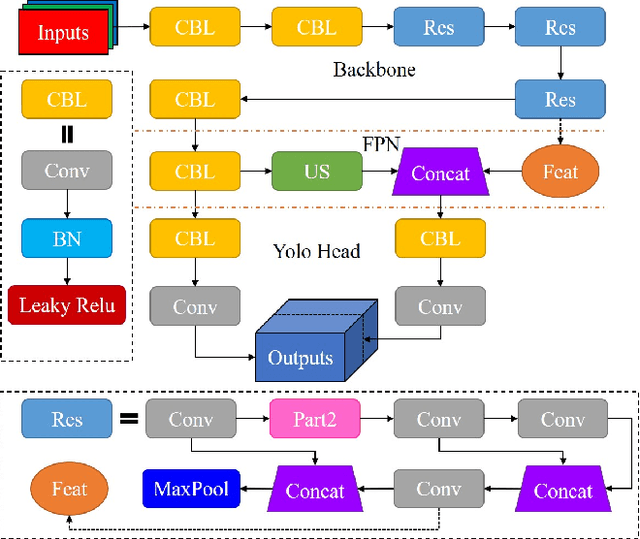
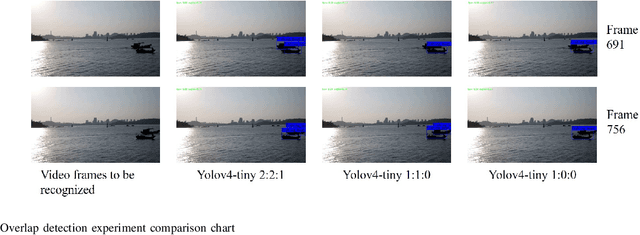
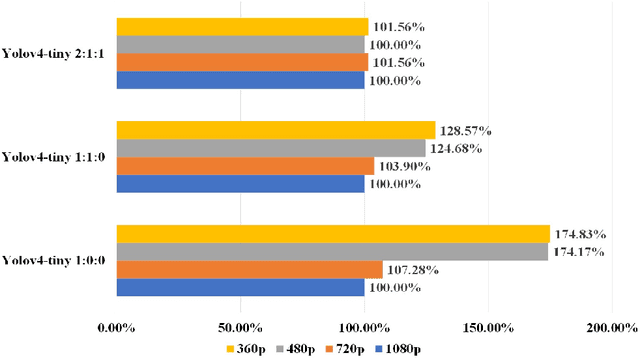
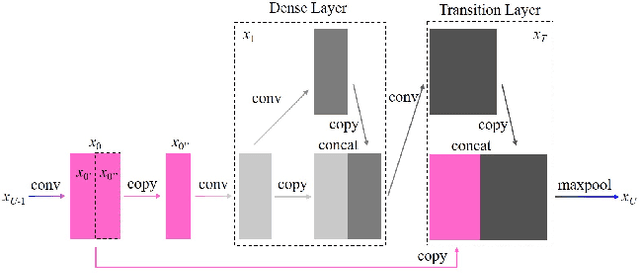
The problem of overlapping occlusion in target recognition has been a difficult research problem, and the situation of mutual occlusion of ship targets in narrow waters still exists. In this paper, an improved mosaic data enhancement method is proposed, which optimizes the reading method of the data set, strengthens the learning ability of the detection algorithm for local features, improves the recognition accuracy of overlapping targets while keeping the test speed unchanged, reduces the decay rate of recognition ability under different resolutions, and strengthens the robustness of the algorithm. The real test experiments prove that, relative to the original algorithm, the improved algorithm improves the recognition accuracy of overlapping targets by 2.5%, reduces the target loss time by 17%, and improves the recognition stability under different video resolutions by 27.01%.