 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecuring Self-supervised Data Curation for Foundation Models Robustness
Jun 08, 2026Self-supervised data curation provides a pathway to scaling and improving the generalization capabilities of machine learning models. By leveraging self-supervised learning (SSL) for data curation, the demand for massive training datasets required by foundation models can be effectively met. SSL greatly alleviates the costs associated with annotation and manual dataset curation while minimizing the need for human oversight. However, the integrity of SSL-curated datasets must be rigorously checked, as reliance on anonymous and unvetted external sources can substantially increase the risk of data poisoning. In this paper, we propose a Poisoned Data Detector (PDD), an active defense mechanism designed to ensure the integrity of SSL-curated datasets prior to foundation model training. PDDs are designed using a combination of the pretrained ImageBind model and traditional classifiers, including Random Forest (RF), k-Nearest Neighbors (KNN), Naive Bayes (NB), and Support Vector Machines (SVM). We rigorously evaluated PDDs using 176,200 images from three diverse datasets and three different adversarial attacks encompassing both in-distribution and out-of-distribution scenarios. Notably, SVM-PDD achieves superior performance for both in-distribution (Set3-Set5) and out-of-distribution (TrueFace and 140K RealFace) datasets. Our design demonstrates strong scalability and enables the rapid integration of new adversarial attack detectors through an ensemble approach.
Robust Vision Systems for Connected and Autonomous Vehicles: Security Challenges and Attack Vectors
Feb 11, 2026This article investigates the robustness of vision systems in Connected and Autonomous Vehicles (CAVs), which is critical for developing Level-5 autonomous driving capabilities. Safe and reliable CAV navigation undeniably depends on robust vision systems that enable accurate detection of objects, lane markings, and traffic signage. We analyze the key sensors and vision components essential for CAV navigation to derive a reference architecture for CAV vision system (CAVVS). This reference architecture provides a basis for identifying potential attack surfaces of CAVVS. Subsequently, we elaborate on identified attack vectors targeting each attack surface, rigorously evaluating their implications for confidentiality, integrity, and availability (CIA). Our study provides a comprehensive understanding of attack vector dynamics in vision systems, which is crucial for formulating robust security measures that can uphold the principles of the CIA triad.
Simple Path Structural Encoding for Graph Transformers
Feb 13, 2025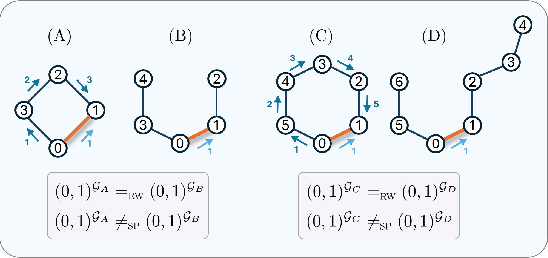
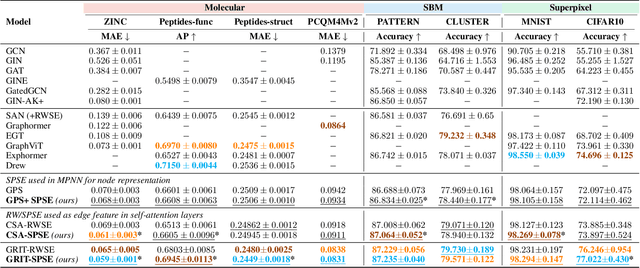
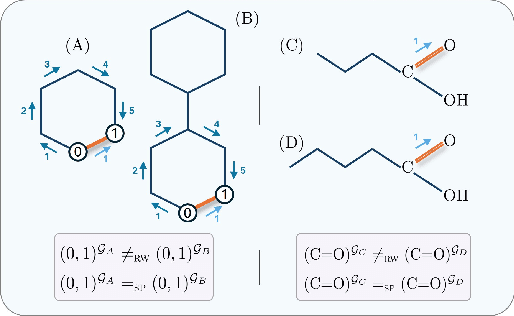
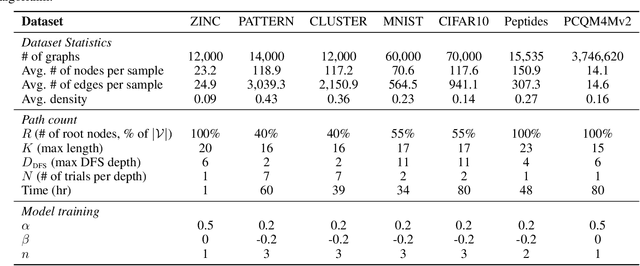
Graph transformers extend global self-attention to graph-structured data, achieving notable success in graph learning. Recently, random walk structural encoding (RWSE) has been found to further enhance their predictive power by encoding both structural and positional information into the edge representation. However, RWSE cannot always distinguish between edges that belong to different local graph patterns, which reduces its ability to capture the full structural complexity of graphs. This work introduces Simple Path Structural Encoding (SPSE), a novel method that utilizes simple path counts for edge encoding. We show theoretically and experimentally that SPSE overcomes the limitations of RWSE, providing a richer representation of graph structures, particularly for capturing local cyclic patterns. To make SPSE computationally tractable, we propose an efficient approximate algorithm for simple path counting. SPSE demonstrates significant performance improvements over RWSE on various benchmarks, including molecular and long-range graph datasets, achieving statistically significant gains in discriminative tasks. These results pose SPSE as a powerful edge encoding alternative for enhancing the expressivity of graph transformers.
Histogram-less LiDAR through SPAD response linearization
Oct 13, 2023We present a new method to acquire the 3D information from a SPAD-based direct-Time-of-Flight (d-ToF) imaging system which does not require the construction of a histogram of timestamps and can withstand high flux operation regime. The proposed acquisition scheme emulates the behavior of a SPAD detector with no distortion due to dead time, and extracts the Tof information by a simple average operation on the photon timestamps ensuring ease of integration in a dedicated sensor and scalability to large arrays. The method is validated through a comprehensive mathematical analysis, whose predictions are in agreement with a numerical Monte Carlo model of the problem. Finally, we show the validity of the predictions in a real d-ToF measurement setup under challenging background conditions well beyond the typical pile-up limit of 5% detection rate up to a distance of 3.8 m.
Follow, listen, feel and go: alternative guidance systems for a walking assistance device
Jan 15, 2016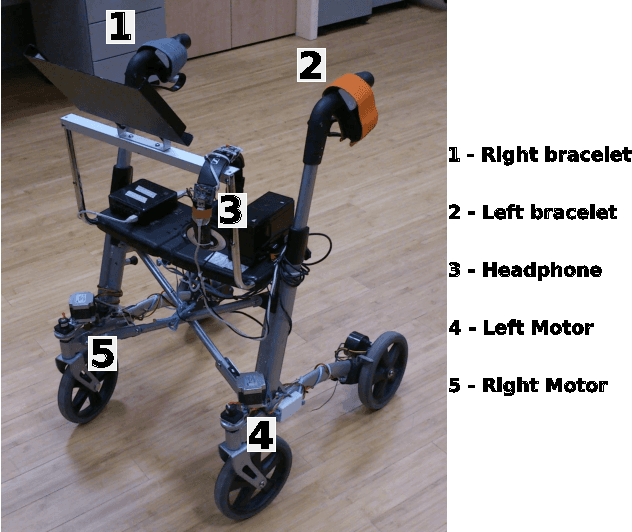
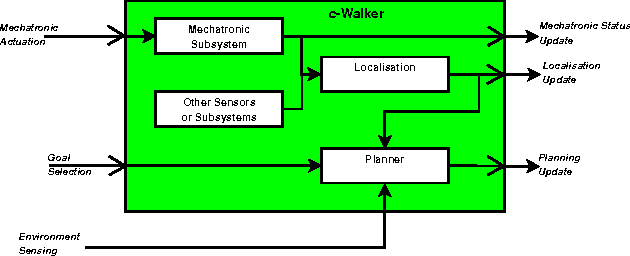
In this paper, we propose several solutions to guide an older adult along a safe path using a robotic walking assistant (the c-Walker). We consider four different possibilities to execute the task. One of them is mechanical, with the c-Walker playing an active role in setting the course. The other ones are based on tactile or acoustic stimuli, and suggest a direction of motion that the user is supposed to take on her own will. We describe the technological basis for the hardware components implementing the different solutions, and show specialized path following algorithms for each of them. The paper reports an extensive user validation activity with a quantitative and qualitative analysis of the different solutions. In this work, we test our system just with young participants to establish a safer methodology that will be used in future studies with older adults.