 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFollow, listen, feel and go: alternative guidance systems for a walking assistance device
Jan 15, 2016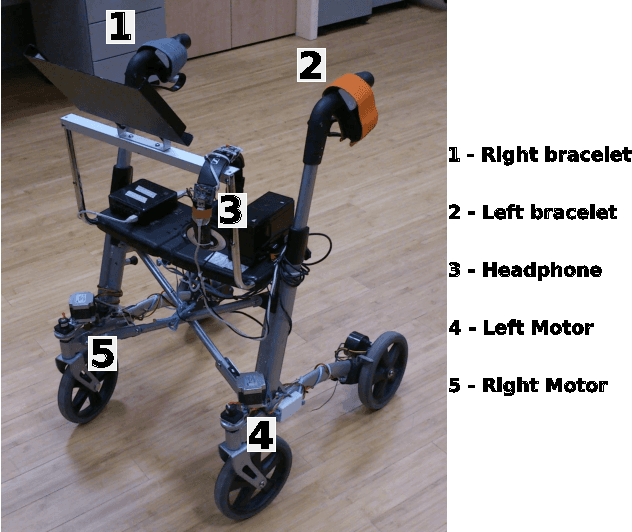
In this paper, we propose several solutions to guide an older adult along a safe path using a robotic walking assistant (the c-Walker). We consider four different possibilities to execute the task. One of them is mechanical, with the c-Walker playing an active role in setting the course. The other ones are based on tactile or acoustic stimuli, and suggest a direction of motion that the user is supposed to take on her own will. We describe the technological basis for the hardware components implementing the different solutions, and show specialized path following algorithms for each of them. The paper reports an extensive user validation activity with a quantitative and qualitative analysis of the different solutions. In this work, we test our system just with young participants to establish a safer methodology that will be used in future studies with older adults.