 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning under Continuous Time and Resource Uncertainty: A Challenge for AI
Dec 12, 2012
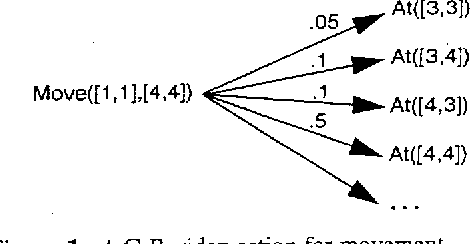
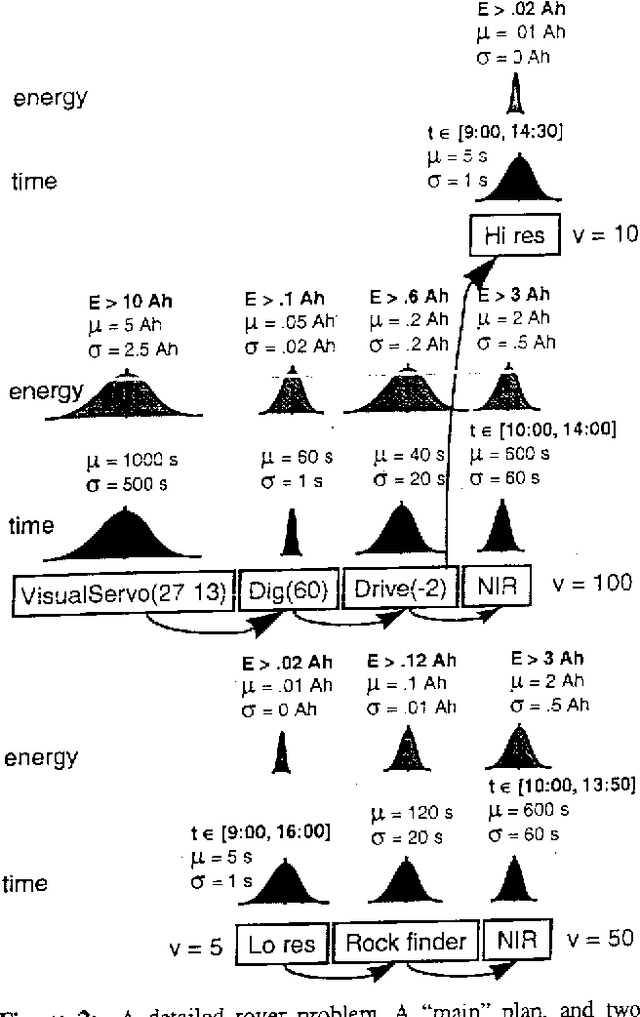
We outline a class of problems, typical of Mars rover operations, that are problematic for current methods of planning under uncertainty. The existing methods fail because they suffer from one or more of the following limitations: 1) they rely on very simple models of actions and time, 2) they assume that uncertainty is manifested in discrete action outcomes, 3) they are only practical for very small problems. For many real world problems, these assumptions fail to hold. In particular, when planning the activities for a Mars rover, none of the above assumptions is valid: 1) actions can be concurrent and have differing durations, 2) there is uncertainty concerning action durations and consumption of continuous resources like power, and 3) typical daily plans involve on the order of a hundred actions. This class of problems may be of particular interest to the UAI community because both classical and decision-theoretic planning techniques may be useful in solving it. We describe the rover problem, discuss previous work on planning under uncertainty, and present a detailed, but very small, example illustrating some of the difficulties of finding good plans.
Dynamic Programming for Structured Continuous Markov Decision Problems
Jul 11, 2012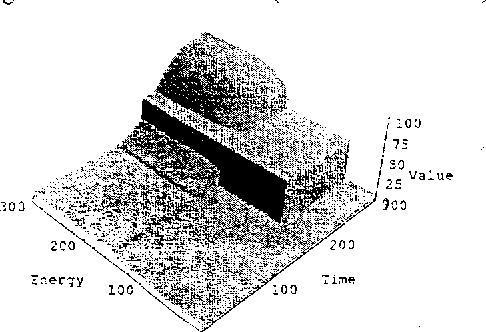
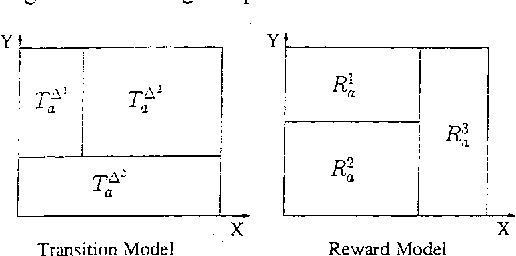
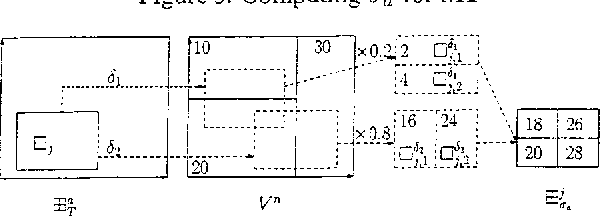
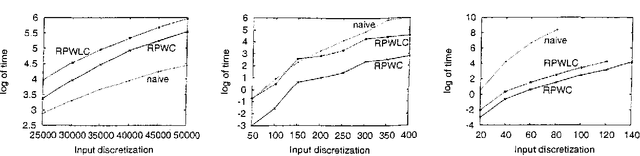
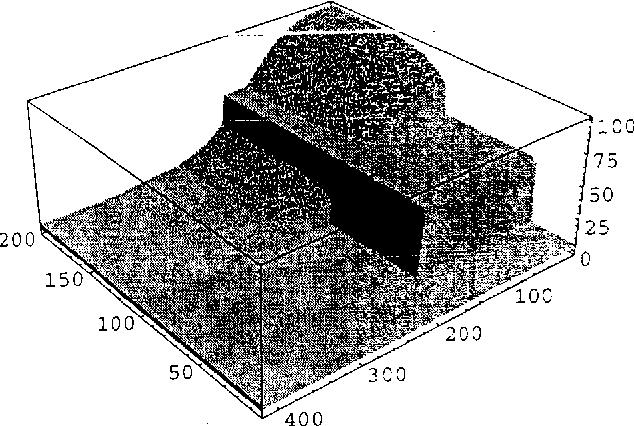
We describe an approach for exploiting structure in Markov Decision Processes with continuous state variables. At each step of the dynamic programming, the state space is dynamically partitioned into regions where the value function is the same throughout the region. We first describe the algorithm for piecewise constant representations. We then extend it to piecewise linear representations, using techniques from POMDPs to represent and reason about linear surfaces efficiently. We show that for complex, structured problems, our approach exploits the natural structure so that optimal solutions can be computed efficiently.
Learning to automatically detect features for mobile robots using second-order Hidden Markov Models
Jan 24, 2005


In this paper, we propose a new method based on Hidden Markov Models to interpret temporal sequences of sensor data from mobile robots to automatically detect features. Hidden Markov Models have been used for a long time in pattern recognition, especially in speech recognition. Their main advantages over other methods (such as neural networks) are their ability to model noisy temporal signals of variable length. We show in this paper that this approach is well suited for interpretation of temporal sequences of mobile-robot sensor data. We present two distinct experiments and results: the first one in an indoor environment where a mobile robot learns to detect features like open doors or T-intersections, the second one in an outdoor environment where a different mobile robot has to identify situations like climbing a hill or crossing a rock.