 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning under Continuous Time and Resource Uncertainty: A Challenge for AI
Dec 12, 2012
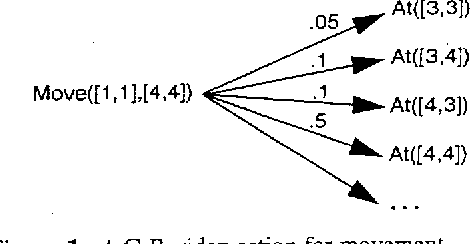
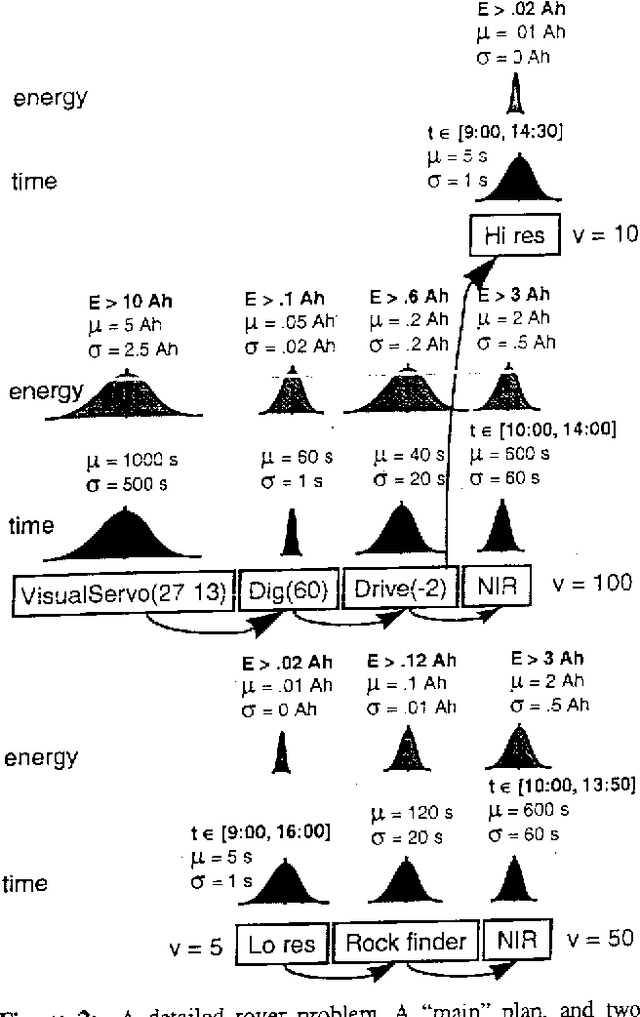
We outline a class of problems, typical of Mars rover operations, that are problematic for current methods of planning under uncertainty. The existing methods fail because they suffer from one or more of the following limitations: 1) they rely on very simple models of actions and time, 2) they assume that uncertainty is manifested in discrete action outcomes, 3) they are only practical for very small problems. For many real world problems, these assumptions fail to hold. In particular, when planning the activities for a Mars rover, none of the above assumptions is valid: 1) actions can be concurrent and have differing durations, 2) there is uncertainty concerning action durations and consumption of continuous resources like power, and 3) typical daily plans involve on the order of a hundred actions. This class of problems may be of particular interest to the UAI community because both classical and decision-theoretic planning techniques may be useful in solving it. We describe the rover problem, discuss previous work on planning under uncertainty, and present a detailed, but very small, example illustrating some of the difficulties of finding good plans.