 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to automatically detect features for mobile robots using second-order Hidden Markov Models
Paper and Code
Jan 24, 2005

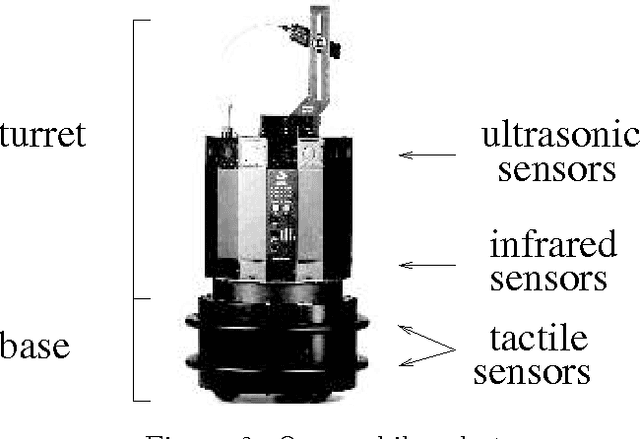

In this paper, we propose a new method based on Hidden Markov Models to interpret temporal sequences of sensor data from mobile robots to automatically detect features. Hidden Markov Models have been used for a long time in pattern recognition, especially in speech recognition. Their main advantages over other methods (such as neural networks) are their ability to model noisy temporal signals of variable length. We show in this paper that this approach is well suited for interpretation of temporal sequences of mobile-robot sensor data. We present two distinct experiments and results: the first one in an indoor environment where a mobile robot learns to detect features like open doors or T-intersections, the second one in an outdoor environment where a different mobile robot has to identify situations like climbing a hill or crossing a rock.