 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Large Vision-language Models for Surgical Tool Detection
Jan 23, 2026Surgery is a highly complex process, and artificial intelligence has emerged as a transformative force in supporting surgical guidance and decision-making. However, the unimodal nature of most current AI systems limits their ability to achieve a holistic understanding of surgical workflows. This highlights the need for general-purpose surgical AI systems capable of comprehensively modeling the interrelated components of surgical scenes. Recent advances in large vision-language models that integrate multimodal data processing offer strong potential for modeling surgical tasks and providing human-like scene reasoning and understanding. Despite their promise, systematic investigations of VLMs in surgical applications remain limited. In this study, we evaluate the effectiveness of large VLMs for the fundamental surgical vision task of detecting surgical tools. Specifically, we investigate three state-of-the-art VLMs, Qwen2.5, LLaVA1.5, and InternVL3.5, on the GraSP robotic surgery dataset under both zero-shot and parameter-efficient LoRA fine-tuning settings. Our results demonstrate that Qwen2.5 consistently achieves superior detection performance in both configurations among the evaluated VLMs. Furthermore, compared with the open-set detection baseline Grounding DINO, Qwen2.5 exhibits stronger zero-shot generalization and comparable fine-tuned performance. Notably, Qwen2.5 shows superior instrument recognition, while Grounding DINO demonstrates stronger localization.
Toward Patient-specific Partial Point Cloud to Surface Completion for Pre- to Intra-operative Registration in Image-guided Liver Interventions
May 26, 2025Intra-operative data captured during image-guided surgery lacks sub-surface information, where key regions of interest, such as vessels and tumors, reside. Image-to-physical registration enables the fusion of pre-operative information and intra-operative data, typically represented as a point cloud. However, this registration process struggles due to partial visibility of the intra-operative point cloud. In this research, we propose a patient-specific point cloud completion approach to assist with the registration process. Specifically, we leverage VN-OccNet to generate a complete liver surface from a partial intra-operative point cloud. The network is trained in a patient-specific manner, where simulated deformations from the pre-operative model are used to train the model. First, we conduct an in-depth analysis of VN-OccNet's rotation-equivariant property and its effectiveness in recovering complete surfaces from partial intra-operative surfaces. Next, we integrate the completed intra-operative surface into the Go-ICP registration algorithm to demonstrate its utility in improving initial rigid registration outcomes. Our results highlight the promise of this patient-specific completion approach in mitigating the challenges posed by partial intra-operative visibility. The rotation equivariant and surface generation capabilities of VN-OccNet hold strong promise for developing robust registration frameworks for variations of the intra-operative point cloud.
Evaluation of Intra-operative Patient-specific Methods for Point Cloud Completion for Minimally Invasive Liver Interventions
Mar 15, 2025The registration between the pre-operative model and the intra-operative surface is crucial in image-guided liver surgery, as it facilitates the effective use of pre-operative information during the procedure. However, the intra-operative surface, usually represented as a point cloud, often has limited coverage, especially in laparoscopic surgery, and is prone to holes and noise, posing significant challenges for registration methods. Point cloud completion methods have the potential to alleviate these issues. Thus, we explore six state-of-the-art point cloud completion methods to identify the optimal completion method for liver surgery applications. We focus on a patient-specific approach for liver point cloud completion from a partial liver surface under three cases: canonical pose, non-canonical pose, and canonical pose with noise. The transformer-based method, AdaPoinTr, outperforms all other methods to generate a complete point cloud from the given partial liver point cloud under the canonical pose. On the other hand, our findings reveal substantial performance degradation of these methods under non-canonical poses and noisy settings, highlighting the limitations of these methods, which suggests the need for a robust point completion method for its application in image-guided liver surgery.
Multi-Scale Feature Fusion with Image-Driven Spatial Integration for Left Atrium Segmentation from Cardiac MRI Images
Feb 10, 2025



Accurate segmentation of the left atrium (LA) from late gadolinium-enhanced magnetic resonance imaging plays a vital role in visualizing diseased atrial structures, enabling the diagnosis and management of cardiovascular diseases. It is particularly essential for planning treatment with ablation therapy, a key intervention for atrial fibrillation (AF). However, manual segmentation is time-intensive and prone to inter-observer variability, underscoring the need for automated solutions. Class-agnostic foundation models like DINOv2 have demonstrated remarkable feature extraction capabilities in vision tasks. However, their lack of domain specificity and task-specific adaptation can reduce spatial resolution during feature extraction, impacting the capture of fine anatomical detail in medical imaging. To address this limitation, we propose a segmentation framework that integrates DINOv2 as an encoder with a UNet-style decoder, incorporating multi-scale feature fusion and input image integration to enhance segmentation accuracy. The learnable weighting mechanism dynamically prioritizes hierarchical features from different encoder blocks of the foundation model, optimizing feature selection for task relevance. Additionally, the input image is reintroduced during the decoding stage to preserve high-resolution spatial details, addressing limitations of downsampling in the encoder. We validate our approach on the LAScarQS 2022 dataset and demonstrate improved performance with a 92.3% Dice and 84.1% IoU score for giant architecture compared to the nnUNet baseline model. These findings emphasize the efficacy of our approach in advancing the field of automated left atrium segmentation from cardiac MRI.
Resolving the Ambiguity of Complete-to-Partial Point Cloud Registration for Image-Guided Liver Surgery with Patches-to-Partial Matching
Dec 26, 2024In image-guided liver surgery, the initial rigid alignment between preoperative and intraoperative data, often represented as point clouds, is crucial for providing sub-surface information from preoperative CT/MRI images to the surgeon during the procedure. Currently, this alignment is typically performed using semi-automatic methods, which, while effective to some extent, are prone to errors that demand manual correction. Point cloud correspondence-based registration methods are promising to serve as a fully automatic solution. However, they may struggle in scenarios with limited intraoperative surface visibility, a common challenge in liver surgery, particularly in laparoscopic procedures, which we refer to as complete-to-partial ambiguity. We first illustrate this ambiguity by evaluating the performance of state-of-the-art learning-based point cloud registration methods on our carefully constructed in silico and in vitro datasets. Then, we propose a patches-to-partial matching strategy as a plug-and-play module to resolve the ambiguity, which can be seamlessly integrated into learning-based registration methods without disrupting their end-to-end structure. It has proven effective and efficient in improving registration performance for cases with limited intraoperative visibility. The constructed benchmark and the proposed module establish a solid foundation for advancing applications of point cloud correspondence-based registration methods in image-guided liver surgery.
Assessing the Performance of the DINOv2 Self-supervised Learning Vision Transformer Model for the Segmentation of the Left Atrium from MRI Images
Nov 14, 2024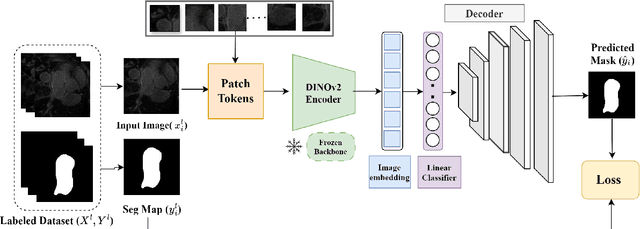
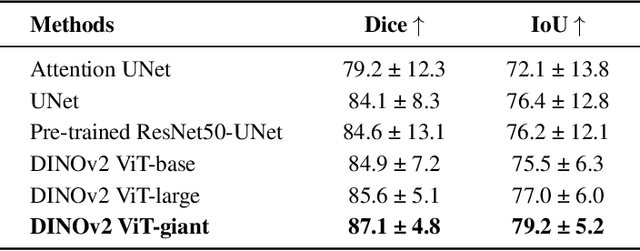
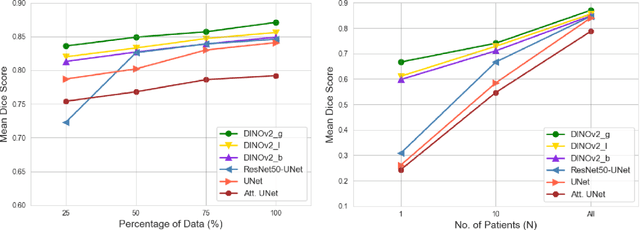
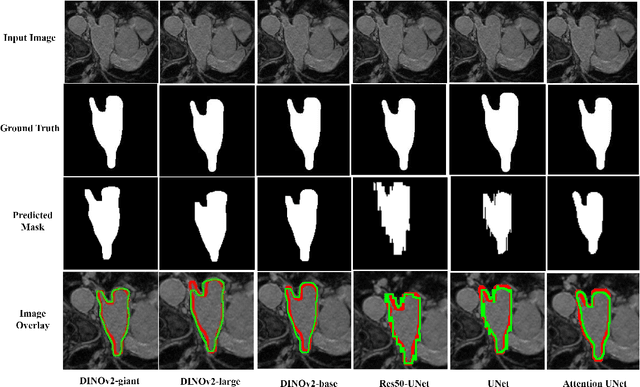
Accurate left atrium (LA) segmentation from pre-operative scans is crucial for diagnosing atrial fibrillation, treatment planning, and supporting surgical interventions. While deep learning models are key in medical image segmentation, they often require extensive manually annotated data. Foundation models trained on larger datasets have reduced this dependency, enhancing generalizability and robustness through transfer learning. We explore DINOv2, a self-supervised learning vision transformer trained on natural images, for LA segmentation using MRI. The challenges for LA's complex anatomy, thin boundaries, and limited annotated data make accurate segmentation difficult before & during the image-guided intervention. We demonstrate DINOv2's ability to provide accurate & consistent segmentation, achieving a mean Dice score of .871 & a Jaccard Index of .792 for end-to-end fine-tuning. Through few-shot learning across various data sizes & patient counts, DINOv2 consistently outperforms baseline models. These results suggest that DINOv2 effectively adapts to MRI with limited data, highlighting its potential as a competitive tool for segmentation & encouraging broader use in medical imaging.
Boundary Constraint-free Biomechanical Model-Based Surface Matching for Intraoperative Liver Deformation Correction
Mar 15, 2024



In image-guided liver surgery, 3D-3D non-rigid registration methods play a crucial role in estimating the mapping between the preoperative model and the intraoperative surface represented as point clouds, addressing the challenge of tissue deformation. Typically, these methods incorporate a biomechanical model, represented as a finite element model (FEM), used to regularize a surface matching term. This paper introduces a novel 3D-3D non-rigid registration method. In contrast to the preceding techniques, our method uniquely incorporates the FEM within the surface matching term itself, ensuring that the estimated deformation maintains geometric consistency throughout the registration process. Additionally, we eliminate the need to determine zero-boundary conditions and applied force locations in the FEM. We achieve this by integrating soft springs into the stiffness matrix and allowing forces to be distributed across the entire liver surface. To further improve robustness, we introduce a regularization technique focused on the gradient of the force magnitudes. This regularization imposes spatial smoothness and helps prevent the overfitting of irregular noise in intraoperative data. Optimization is achieved through an accelerated proximal gradient algorithm, further enhanced by our proposed method for determining the optimal step size. Our method is evaluated and compared to both a learning-based method and a traditional method that features FEM regularization using data collected on our custom-developed phantom, as well as two publicly available datasets. Our method consistently outperforms or is comparable to the baseline techniques. Both the code and dataset will be made publicly available.
A Disparity Refinement Framework for Learning-based Stereo Matching Methods in Cross-domain Setting for Laparoscopic Images
Feb 05, 2023Purpose: Stereo matching methods that enable depth estimation are crucial for visualization enhancement applications in computer-assisted surgery (CAS). Learning-based stereo matching methods are promising to predict accurate results on laparoscopic images. However, they require a large amount of training data, and their performance may be degraded due to domain shifts. Methods: Maintaining robustness and improving the accuracy of learning-based methods are still open problems. To overcome the limitations of learning-based methods, we propose a disparity refinement framework consisting of a local disparity refinement method and a global disparity refinement method to improve the results of learning-based stereo matching methods in a cross-domain setting. Those learning-based stereo matching methods are pre-trained on a large public dataset of natural images and are tested on two datasets of laparoscopic images. Results: Qualitative and quantitative results suggest that our proposed disparity framework can effectively refine disparity maps when they are noise-corrupted on an unseen dataset, without compromising prediction accuracy when the network can generalize well on an unseen dataset. Conclusion: Our proposed disparity refinement framework could work with learning-based methods to achieve robust and accurate disparity prediction. Yet, as a large laparoscopic dataset for training learning-based methods does not exist and the generalization ability of networks remains to be improved, the incorporation of the proposed disparity refinement framework into existing networks will contribute to improving their overall accuracy and robustness associated with depth estimation.
Learning Feature Descriptors for Pre- and Intra-operative Point Cloud Matching for Laparoscopic Liver Registration
Nov 07, 2022Purpose: In laparoscopic liver surgery (LLS), pre-operative information can be overlaid onto the intra-operative scene by registering a 3D pre-operative model to the intra-operative partial surface reconstructed from the laparoscopic video. To assist with this task, we explore the use of learning-based feature descriptors, which, to our best knowledge, have not been explored for use in laparoscopic liver registration. Furthermore, a dataset to train and evaluate the use of learning-based descriptors does not exist. Methods: We present the LiverMatch dataset consisting of 16 preoperative models and their simulated intra-operative 3D surfaces. We also propose the LiverMatch network designed for this task, which outputs per-point feature descriptors, visibility scores, and matched points. Results: We compare the proposed LiverMatch network with anetwork closest to LiverMatch, and a histogram-based 3D descriptor on the testing split of the LiverMatch dataset, which includes two unseen pre-operative models and 1400 intra-operative surfaces. Results suggest that our LiverMatch network can predict more accurate and dense matches than the other two methods and can be seamlessly integrated with a RANSAC-ICP-based registration algorithm to achieve an accurate initial alignment. Conclusion: The use of learning-based feature descriptors in LLR is promising, as it can help achieve an accurate initial rigid alignment, which, in turn, serves as an initialization for subsequent non-rigid registration. We will release the dataset and code upon acceptance.
CNN-based Cardiac Motion Extraction to Generate Deformable Geometric Left Ventricle Myocardial Models from Cine MRI
Mar 30, 2021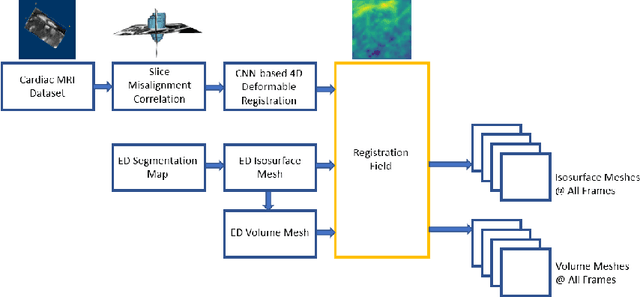
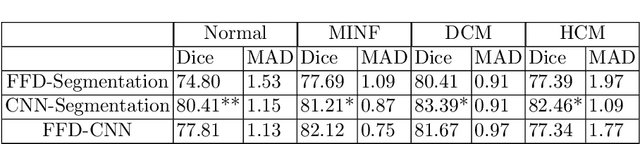

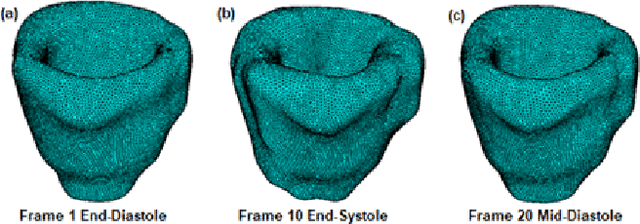
Patient-specific left ventricle (LV) myocardial models have the potential to be used in a variety of clinical scenarios for improved diagnosis and treatment plans. Cine cardiac magnetic resonance (MR) imaging provides high resolution images to reconstruct patient-specific geometric models of the LV myocardium. With the advent of deep learning, accurate segmentation of cardiac chambers from cine cardiac MR images and unsupervised learning for image registration for cardiac motion estimation on a large number of image datasets is attainable. Here, we propose a deep leaning-based framework for the development of patient-specific geometric models of LV myocardium from cine cardiac MR images, using the Automated Cardiac Diagnosis Challenge (ACDC) dataset. We use the deformation field estimated from the VoxelMorph-based convolutional neural network (CNN) to propagate the isosurface mesh and volume mesh of the end-diastole (ED) frame to the subsequent frames of the cardiac cycle. We assess the CNN-based propagated models against segmented models at each cardiac phase, as well as models propagated using another traditional nonrigid image registration technique.