 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBed-Attached Vibration Sensor System: A Machine Learning Approach for Fall Detection in Nursing Homes
Dec 06, 2024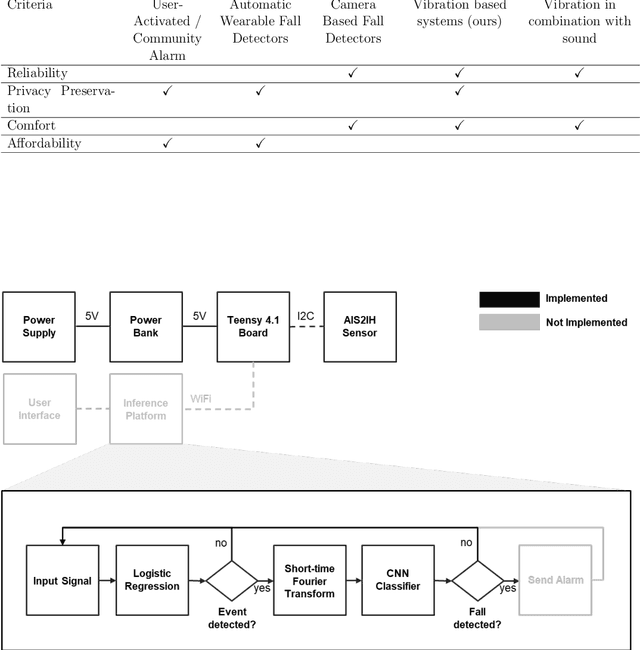
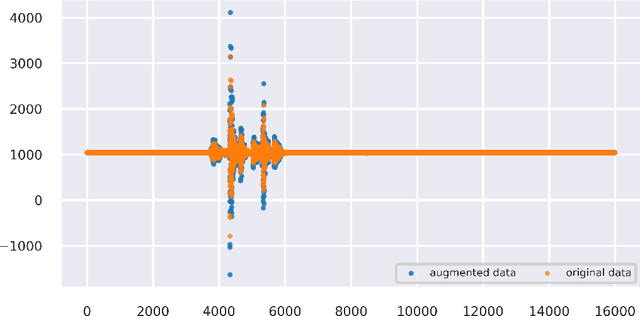
The increasing shortage of nursing staff and the acute risk of falls in nursing homes pose significant challenges for the healthcare system. This study presents the development of an automated fall detection system integrated into care beds, aimed at enhancing patient safety without compromising privacy through wearables or video monitoring. Mechanical vibrations transmitted through the bed frame are processed using a short-time Fourier transform, enabling robust classification of distinct human fall patterns with a convolutional neural network. Challenges pertaining to the quantity and diversity of the data are addressed, proposing the generation of additional data with a specific emphasis on enhancing variation. While the model shows promising results in distinguishing fall events from noise using lab data, further testing in real-world environments is recommended for validation and improvement. Despite limited available data, the proposed system shows the potential for an accurate and rapid response to falls, mitigating health implications, and addressing the needs of an aging population. This case study was performed as part of the ZIM Project. Further research on sensors enhanced by artificial intelligence will be continued in the ShapeFuture Project.
Enhancing Feature Selection and Interpretability in AI Regression Tasks Through Feature Attribution
Sep 25, 2024Research in Explainable Artificial Intelligence (XAI) is increasing, aiming to make deep learning models more transparent. Most XAI methods focus on justifying the decisions made by Artificial Intelligence (AI) systems in security-relevant applications. However, relatively little attention has been given to using these methods to improve the performance and robustness of deep learning algorithms. Additionally, much of the existing XAI work primarily addresses classification problems. In this study, we investigate the potential of feature attribution methods to filter out uninformative features in input data for regression problems, thereby improving the accuracy and stability of predictions. We introduce a feature selection pipeline that combines Integrated Gradients with k-means clustering to select an optimal set of variables from the initial data space. To validate the effectiveness of this approach, we apply it to a real-world industrial problem - blade vibration analysis in the development process of turbo machinery.
DualAD: Disentangling the Dynamic and Static World for End-to-End Driving
Jun 10, 2024State-of-the-art approaches for autonomous driving integrate multiple sub-tasks of the overall driving task into a single pipeline that can be trained in an end-to-end fashion by passing latent representations between the different modules. In contrast to previous approaches that rely on a unified grid to represent the belief state of the scene, we propose dedicated representations to disentangle dynamic agents and static scene elements. This allows us to explicitly compensate for the effect of both ego and object motion between consecutive time steps and to flexibly propagate the belief state through time. Furthermore, dynamic objects can not only attend to the input camera images, but also directly benefit from the inferred static scene structure via a novel dynamic-static cross-attention. Extensive experiments on the challenging nuScenes benchmark demonstrate the benefits of the proposed dual-stream design, especially for modelling highly dynamic agents in the scene, and highlight the improved temporal consistency of our approach. Our method titled DualAD not only outperforms independently trained single-task networks, but also improves over previous state-of-the-art end-to-end models by a large margin on all tasks along the functional chain of driving.
S.T.A.R.-Track: Latent Motion Models for End-to-End 3D Object Tracking with Adaptive Spatio-Temporal Appearance Representations
Jun 30, 2023


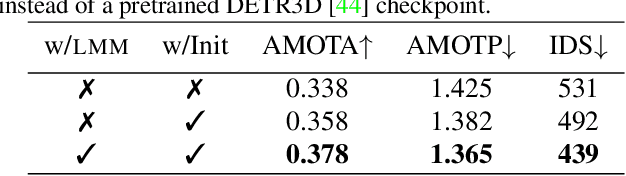
Following the tracking-by-attention paradigm, this paper introduces an object-centric, transformer-based framework for tracking in 3D. Traditional model-based tracking approaches incorporate the geometric effect of object- and ego motion between frames with a geometric motion model. Inspired by this, we propose S.T.A.R.-Track, which uses a novel latent motion model (LMM) to additionally adjust object queries to account for changes in viewing direction and lighting conditions directly in the latent space, while still modeling the geometric motion explicitly. Combined with a novel learnable track embedding that aids in modeling the existence probability of tracks, this results in a generic tracking framework that can be integrated with any query-based detector. Extensive experiments on the nuScenes benchmark demonstrate the benefits of our approach, showing state-of-the-art performance for DETR3D-based trackers while drastically reducing the number of identity switches of tracks at the same time.