 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrifocal Relative Pose from Lines at Points and its Efficient Solution
Apr 16, 2019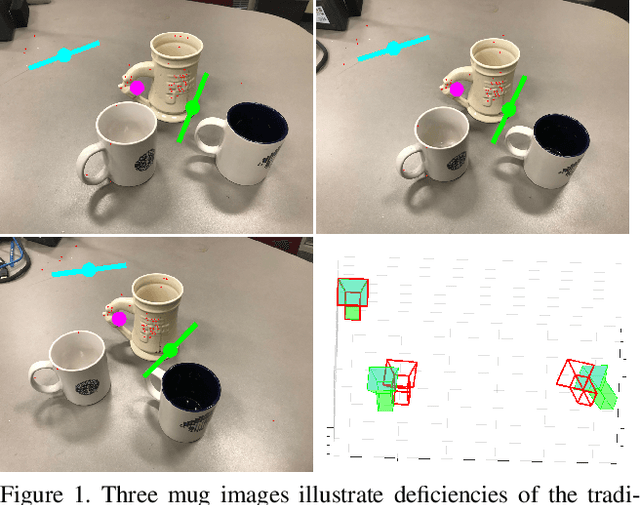
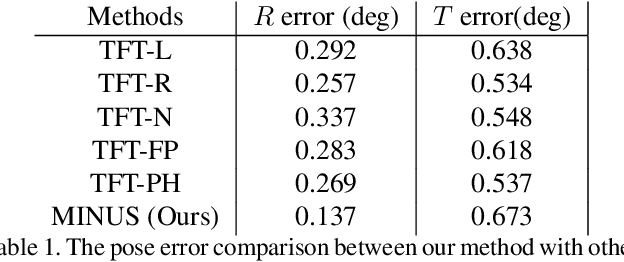
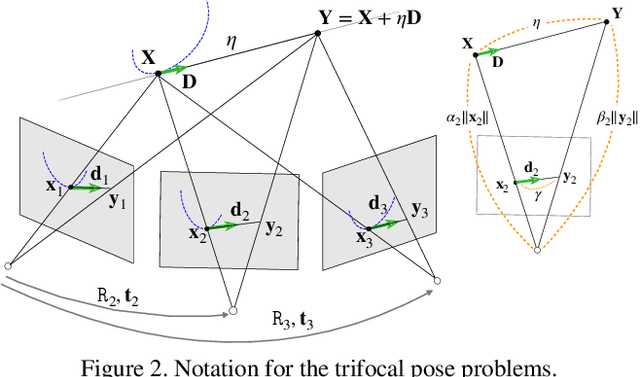

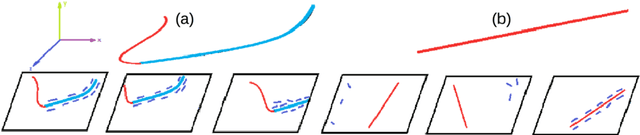
We present a new minimal problem for relative pose estimation mixing point features with lines incident at points observed in three views and its efficient homotopy continuation solver. We demonstrate the generality of the approach by analyzing and solving an additional problem with mixed point and line correspondences in three views. The minimal problems include correspondences of (i) three points and one line and (ii) three points and two lines through two of the points which is reported and analyzed here for the first time. These are difficult to solve, as they have 216 and - as shown here - 312 solutions, but cover important practical situations when line and point features appear together, e.g., in urban scenes or when observing curves. We demonstrate that even such difficult problems can be solved robustly using a suitable homotopy continuation technique and we provide an implementation optimized for minimal problems that can be integrated into engineering applications. Our simulated and real experiments demonstrate our solvers in the camera geometry computation task in structure from motion. We show that new solvers allow for reconstructing challenging scenes where the standard two-view initialization of structure from motion fails.
The Surfacing of Multiview 3D Drawings via Lofting and Occlusion Reasoning
Jul 13, 2017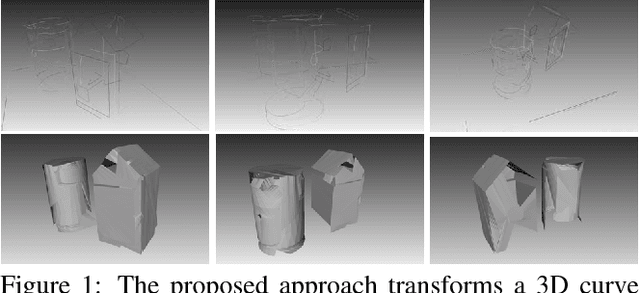
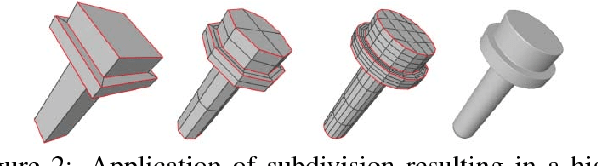
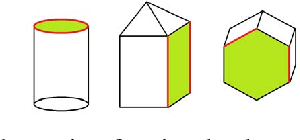
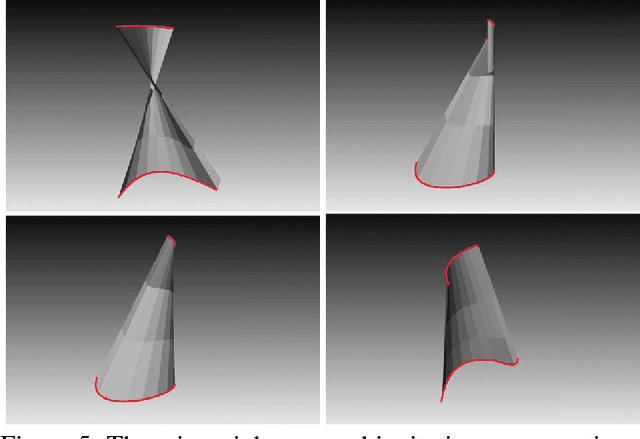
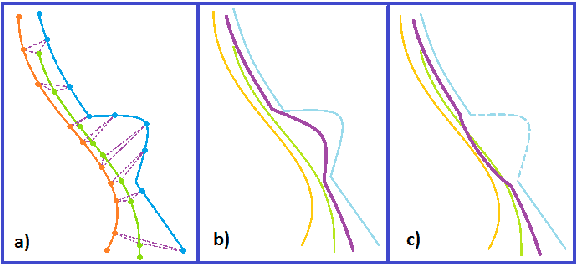
The three-dimensional reconstruction of scenes from multiple views has made impressive strides in recent years, chiefly by methods correlating isolated feature points, intensities, or curvilinear structure. In the general setting, i.e., without requiring controlled acquisition, limited number of objects, abundant patterns on objects, or object curves to follow particular models, the majority of these methods produce unorganized point clouds, meshes, or voxel representations of the reconstructed scene, with some exceptions producing 3D drawings as networks of curves. Many applications, e.g., robotics, urban planning, industrial design, and hard surface modeling, however, require structured representations which make explicit 3D curves, surfaces, and their spatial relationships. Reconstructing surface representations can now be constrained by the 3D drawing acting like a scaffold to hang on the computed representations, leading to increased robustness and quality of reconstruction. This paper presents one way of completing such 3D drawings with surface reconstructions, by exploring occlusion reasoning through lofting algorithms.
From Multiview Image Curves to 3D Drawings
Sep 18, 2016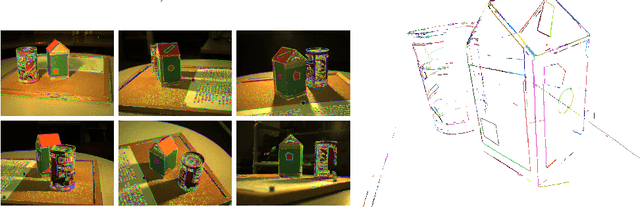

Reconstructing 3D scenes from multiple views has made impressive strides in recent years, chiefly by correlating isolated feature points, intensity patterns, or curvilinear structures. In the general setting - without controlled acquisition, abundant texture, curves and surfaces following specific models or limiting scene complexity - most methods produce unorganized point clouds, meshes, or voxel representations, with some exceptions producing unorganized clouds of 3D curve fragments. Ideally, many applications require structured representations of curves, surfaces and their spatial relationships. This paper presents a step in this direction by formulating an approach that combines 2D image curves into a collection of 3D curves, with topological connectivity between them represented as a 3D graph. This results in a 3D drawing, which is complementary to surface representations in the same sense as a 3D scaffold complements a tent taut over it. We evaluate our results against truth on synthetic and real datasets.
* Expanded ECCV 2016 version with tweaked figures and including an overview of the supplementary material available at multiview-3d-drawing.sourceforge.net
Multiview Differential Geometry of Curves
Apr 27, 2016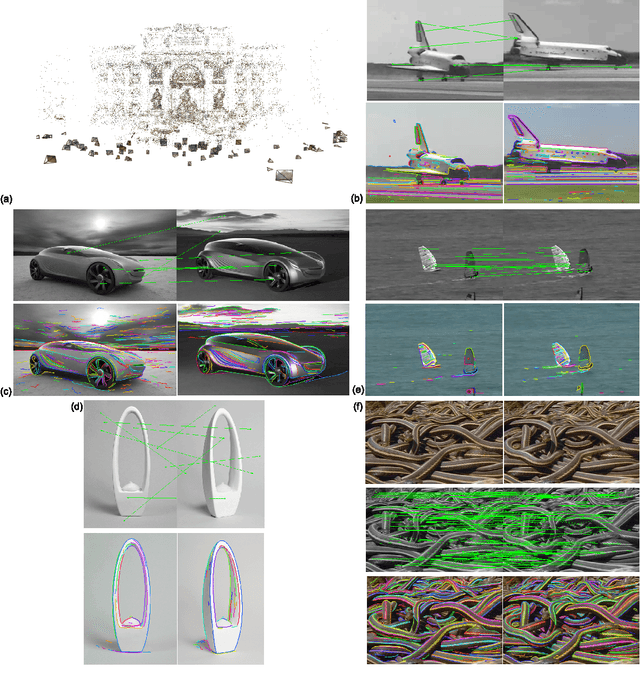



The field of multiple view geometry has seen tremendous progress in reconstruction and calibration due to methods for extracting reliable point features and key developments in projective geometry. Point features, however, are not available in certain applications and result in unstructured point cloud reconstructions. General image curves provide a complementary feature when keypoints are scarce, and result in 3D curve geometry, but face challenges not addressed by the usual projective geometry of points and algebraic curves. We address these challenges by laying the theoretical foundations of a framework based on the differential geometry of general curves, including stationary curves, occluding contours, and non-rigid curves, aiming at stereo correspondence, camera estimation (including calibration, pose, and multiview epipolar geometry), and 3D reconstruction given measured image curves. By gathering previous results into a cohesive theory, novel results were made possible, yielding three contributions. First we derive the differential geometry of an image curve (tangent, curvature, curvature derivative) from that of the underlying space curve (tangent, curvature, curvature derivative, torsion). Second, we derive the differential geometry of a space curve from that of two corresponding image curves. Third, the differential motion of an image curve is derived from camera motion and the differential geometry and motion of the space curve. The availability of such a theory enables novel curve-based multiview reconstruction and camera estimation systems to augment existing point-based approaches. This theory has been used to reconstruct a "3D curve sketch", to determine camera pose from local curve geometry, and tracking; other developments are underway.
An Image-Based Fluid Surface Pattern Model
Sep 30, 2013



This work aims at generating a model of the ocean surface and its dynamics from one or more video cameras. The idea is to model wave patterns from video as a first step towards a larger system of photogrammetric monitoring of marine conditions for use in offshore oil drilling platforms. The first part of the proposed approach consists in reducing the dimensionality of sensor data made up of the many pixels of each frame of the input video streams. This enables finding a concise number of most relevant parameters to model the temporal dataset, yielding an efficient data-driven model of the evolution of the observed surface. The second part proposes stochastic modeling to better capture the patterns embedded in the data. One can then draw samples from the final model, which are expected to simulate the behavior of previously observed flow, in order to determine conditions that match new observations. In this paper we focus on proposing and discussing the overall approach and on comparing two different techniques for dimensionality reduction in the first stage: principal component analysis and diffusion maps. Work is underway on the second stage of constructing better stochastic models of fluid surface dynamics as proposed here.
Multi-q Pattern Classification of Polarization Curves
May 10, 2013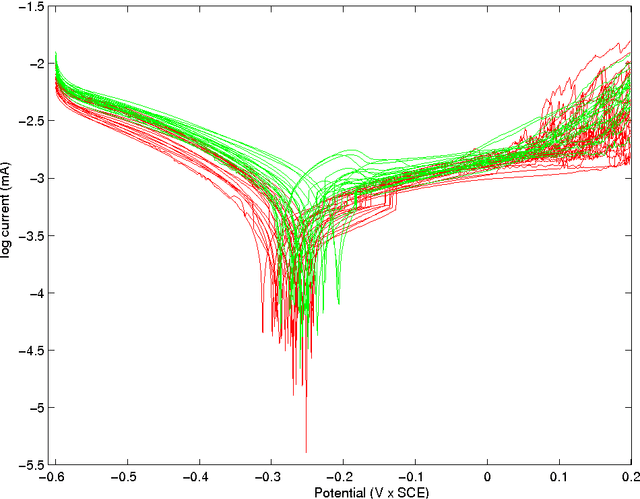
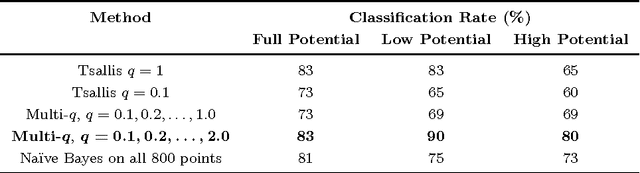
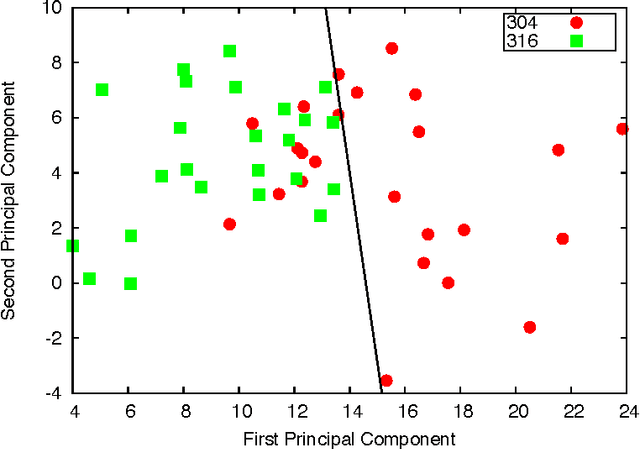
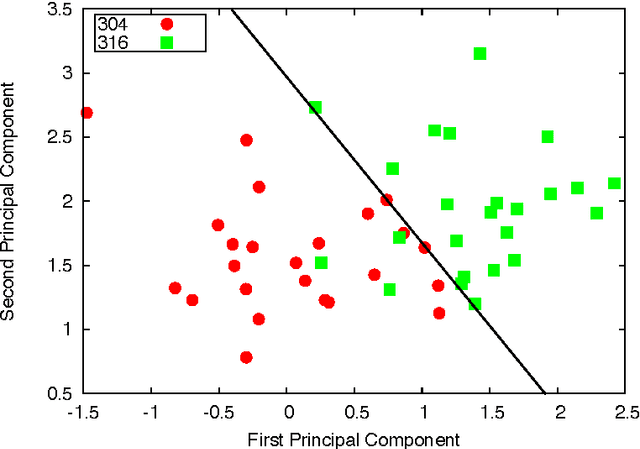
Several experimental measurements are expressed in the form of one-dimensional profiles, for which there is a scarcity of methodologies able to classify the pertinence of a given result to a specific group. The polarization curves that evaluate the corrosion kinetics of electrodes in corrosive media are an application where the behavior is chiefly analyzed from profiles. Polarization curves are indeed a classic method to determine the global kinetics of metallic electrodes, but the strong nonlinearity from different metals and alloys can overlap and the discrimination becomes a challenging problem. Moreover, even finding a typical curve from replicated tests requires subjective judgement. In this paper we used the so-called multi-q approach based on the Tsallis statistics in a classification engine to separate multiple polarization curve profiles of two stainless steels. We collected 48 experimental polarization curves in aqueous chloride medium of two stainless steel types, with different resistance against localized corrosion. Multi-q pattern analysis was then carried out on a wide potential range, from cathodic up to anodic regions. An excellent classification rate was obtained, at a success rate of 90%, 80%, and 83% for low (cathodic), high (anodic), and both potential ranges, respectively, using only 2% of the original profile data. These results show the potential of the proposed approach towards efficient, robust, systematic and automatic classification of highly non-linear profile curves.
Scilab and SIP for Image Processing
Mar 18, 2012


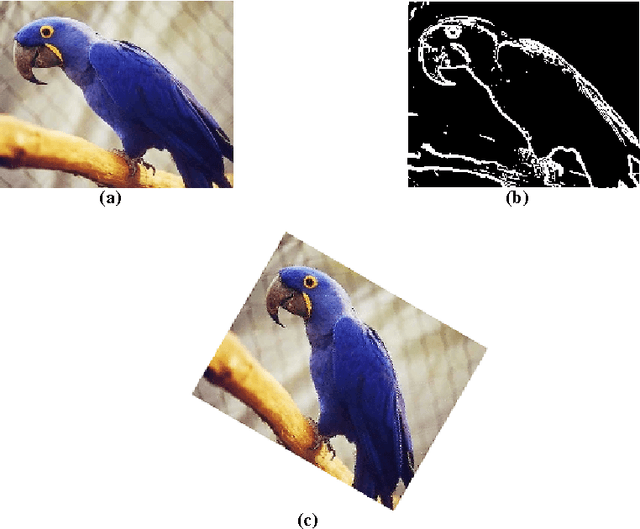
This paper is an overview of Image Processing and Analysis using Scilab, a free prototyping environment for numerical calculations similar to Matlab. We demonstrate the capabilities of SIP -- the Scilab Image Processing Toolbox -- which extends Scilab with many functions to read and write images in over 100 major file formats, including PNG, JPEG, BMP, and TIFF. It also provides routines for image filtering, edge detection, blurring, segmentation, shape analysis, and image recognition. Basic directions to install Scilab and SIP are given, and also a mini-tutorial on Scilab. Three practical examples of image analysis are presented, in increasing degrees of complexity, showing how advanced image analysis techniques seems uncomplicated in this environment.
Multi-q Analysis of Image Patterns
Dec 29, 2011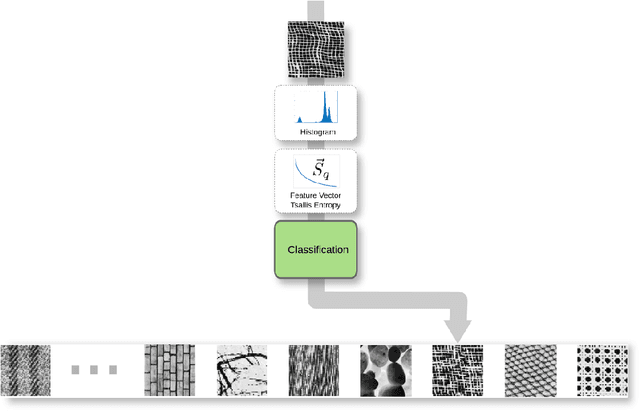
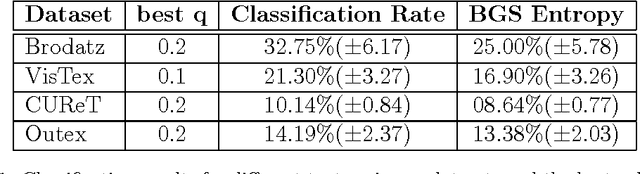

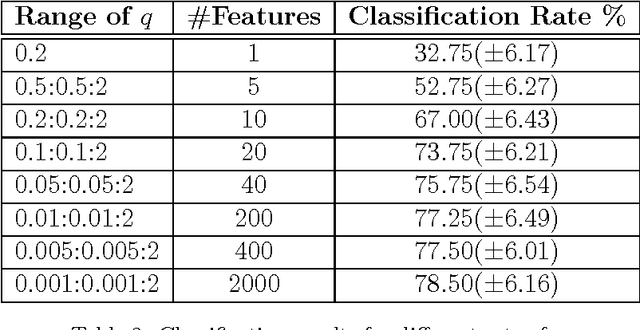
This paper studies the use of the Tsallis Entropy versus the classic Boltzmann-Gibbs-Shannon entropy for classifying image patterns. Given a database of 40 pattern classes, the goal is to determine the class of a given image sample. Our experiments show that the Tsallis entropy encoded in a feature vector for different $q$ indices has great advantage over the Boltzmann-Gibbs-Shannon entropy for pattern classification, boosting recognition rates by a factor of 3. We discuss the reasons behind this success, shedding light on the usefulness of the Tsallis entropy.