 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBio-inspired Soft Grippers for Biological Applications
Jul 19, 2024



The field of bio-inspired soft grippers has emerged as a transformative area of research with profound implications for biomedical applications. This book chapter provides a comprehensive overview of the principles, developments, challenges, and prospects of soft grippers that draw inspiration from biological systems. Bio-inspired soft grippers have gained prominence due to their unique characteristics, including compliance, adaptability, and biocompatibility. They have revolutionized the way we approach biomedical tasks, offering safer interactions with delicate tissues and enabling complex operations that were once inconceivable with rigid tools. The chapter delves into the fundamental importance of soft grippers in biomedical contexts. It outlines their significance in surgeries, diagnostics, tissue engineering, and various medical interventions. Soft grippers have the capacity to mimic the intricate movements of biological organisms, facilitating minimally invasive procedures and enhancing patient outcomes. A historical perspective traces the evolution of soft grippers in biomedical research, highlighting key milestones and breakthroughs. From early attempts to emulate the dexterity of octopus tentacles to the latest advancements in soft lithography and biomaterials, the journey has been marked by ingenuity and collaboration across multiple disciplines. Motivations for adopting soft grippers in biomedical applications are explored, emphasizing their ability to reduce invasiveness, increase precision, and provide adaptability to complex anatomical structures. The requirements and challenges in designing grippers fit for medical contexts are outlined, encompassing biocompatibility, sterilization, control, and integration.
Concurrent Transmission for Multi-Robot Coordination
Dec 01, 2021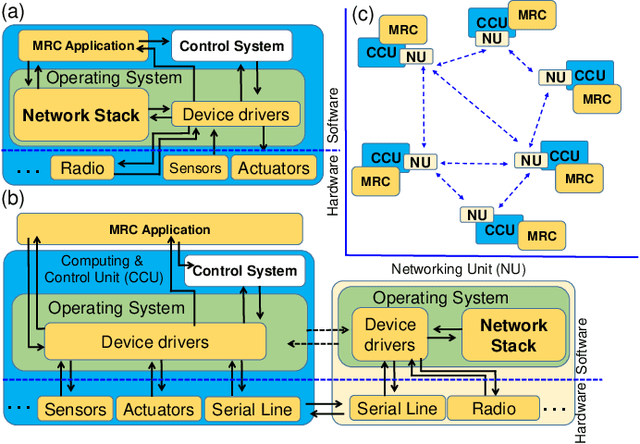
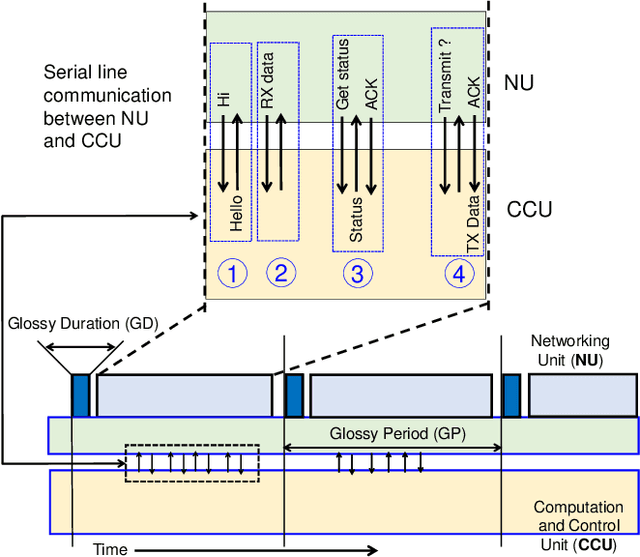
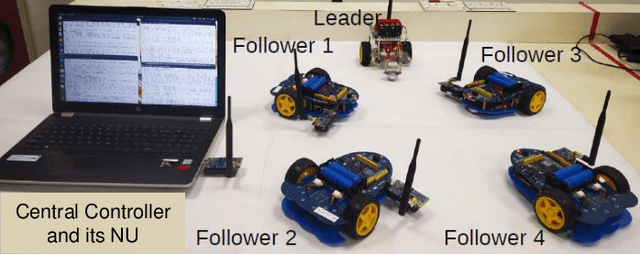
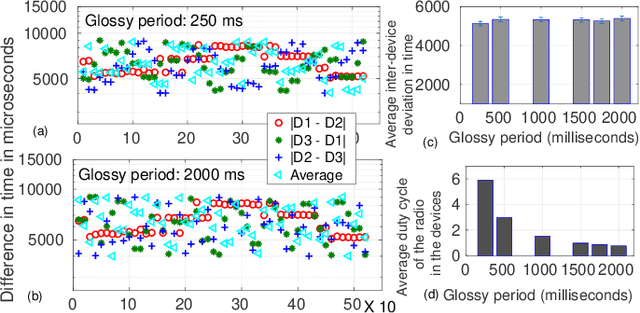
An efficient communication mechanism forms the backbone for any multi-robot system to achieve fruitful collaboration and coordination. Limitation in the existing asynchronous transmission based strategies in fast dissemination and aggregation compels the designers to prune down such requirements as much as possible. This also restricts the possible application areas of mobile multi-robot systems. In this work, we introduce concurrent transmission based strategy as an alternative. Despite the commonly found difficulties in concurrent transmission such as microsecond level time synchronization, hardware heterogeneity, etc., we demonstrate how it can be exploited for multi-robot systems. We propose a split architecture where the two major activities - communication and computation are carried out independently and coordinate through periodic interactions. The proposed split architecture is applied on a custom build full networked control system consisting of five two-wheel differential drive mobile robots having heterogeneous architecture. We use the proposed design in a leader-follower setting for coordinated dynamic speed variation as well as the independent formation of various shapes. Experiments show a centimeter-level spatial and millisecond-level temporal accuracy while spending very low radio duty-cycling over multi-hop communication under a wide testing area.
Design and Development of an automated Robotic Pick & Stow System for an e-Commerce Warehouse
Mar 07, 2017
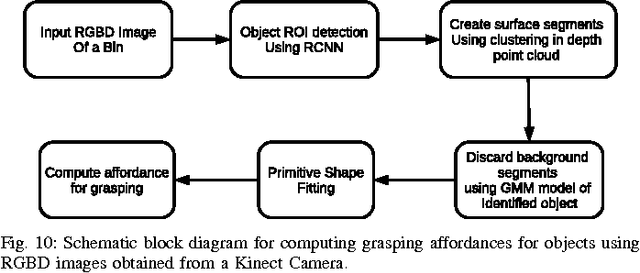
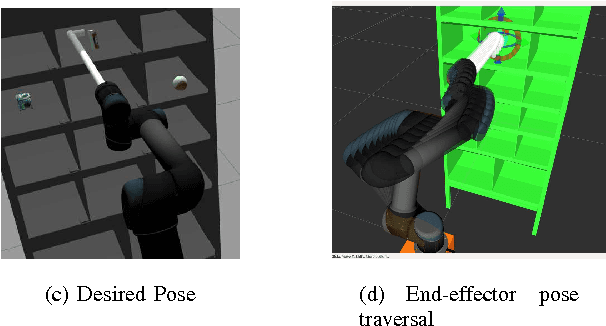
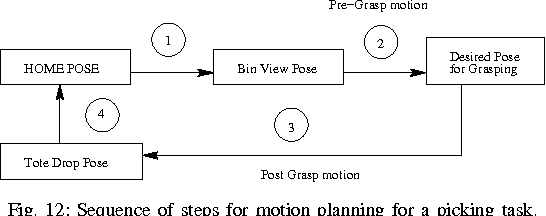
In this paper, we provide details of a robotic system that can automate the task of picking and stowing objects from and to a rack in an e-commerce fulfillment warehouse. The system primarily comprises of four main modules: (1) Perception module responsible for recognizing query objects and localizing them in the 3-dimensional robot workspace; (2) Planning module generates necessary paths that the robot end- effector has to take for reaching the objects in the rack or in the tote; (3) Calibration module that defines the physical workspace for the robot visible through the on-board vision system; and (4) Gripping and suction system for picking and stowing different kinds of objects. The perception module uses a faster region-based Convolutional Neural Network (R-CNN) to recognize objects. We designed a novel two finger gripper that incorporates pneumatic valve based suction effect to enhance its ability to pick different kinds of objects. The system was developed by IITK-TCS team for participation in the Amazon Picking Challenge 2016 event. The team secured a fifth place in the stowing task in the event. The purpose of this article is to share our experiences with students and practicing engineers and enable them to build similar systems. The overall efficacy of the system is demonstrated through several simulation as well as real-world experiments with actual robots.