 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsensus-based Fast and Energy-Efficient Multi-Robot Task Allocation
Sep 21, 2022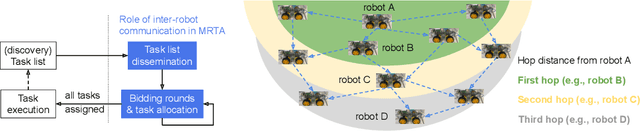
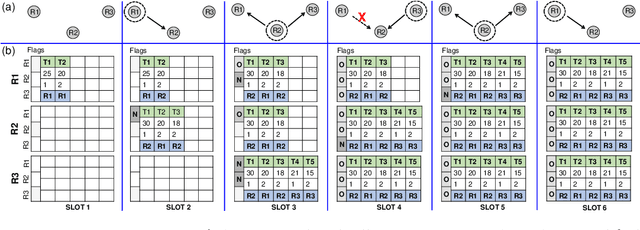
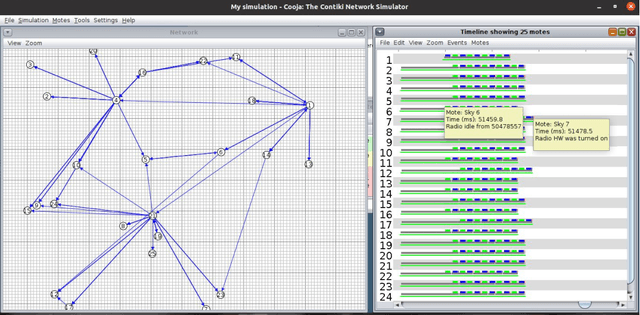
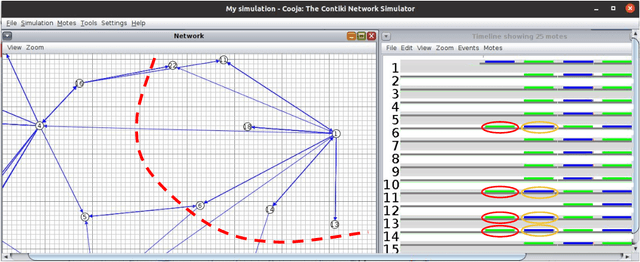
In a multi-robot system, the appropriate allocation of the tasks to the individual robots is a very significant component. The availability of a centralized infrastructure can guarantee an optimal allocation of the tasks. However, in many important scenarios such as search and rescue, exploration, disaster-management, war-field, etc., on-the-fly allocation of the dynamic tasks to the robots in a decentralized fashion is the only possible option. Efficient communication among the robots plays a crucial role in any such decentralized setting. Existing works on distributed Multi-Robot Task Allocation (MRTA) either assume that the network is available or a naive communication paradigm is used. On the contrary, in most of these scenarios, the network infrastructure is either unstable or unavailable and ad-hoc networking is the only resort. Recent developments in synchronous-transmission (ST) based wireless communication protocols are shown to be more efficient than the traditional asynchronous transmission-based protocols in ad hoc networks such as Wireless Sensor Network (WSN)/Internet of Things (IoT) applications. The current work is the first effort that utilizes ST for MRTA. Specifically, we propose an algorithm that efficiently adapts ST-based many-to-many interaction and minimizes the information exchange to reach a consensus for task allocation. We showcase the efficacy of the proposed algorithm through an extensive simulation-based study of its latency and energy-efficiency under different settings.
Concurrent Transmission for Multi-Robot Coordination
Dec 01, 2021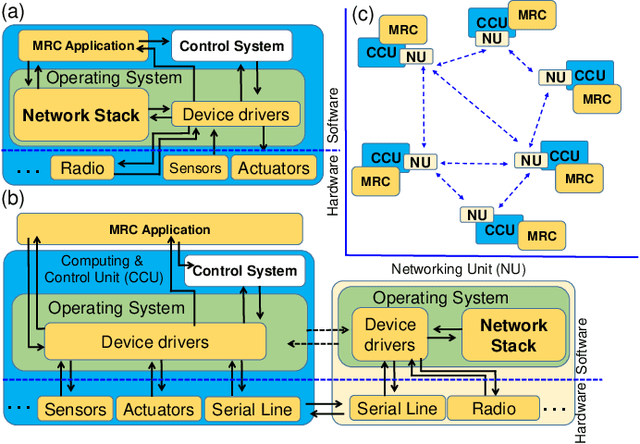
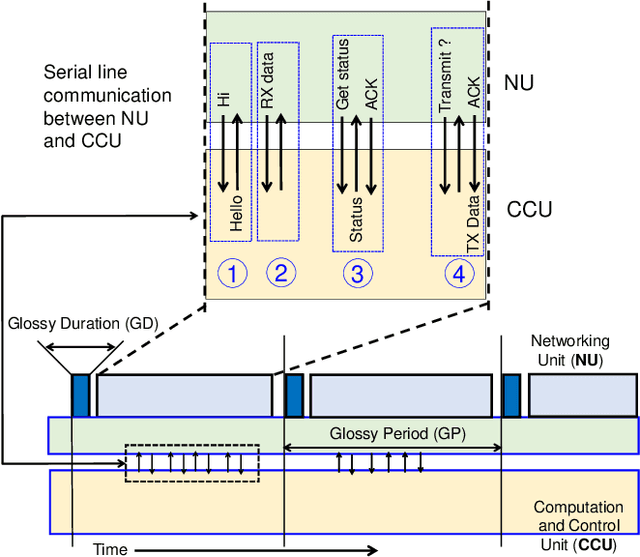
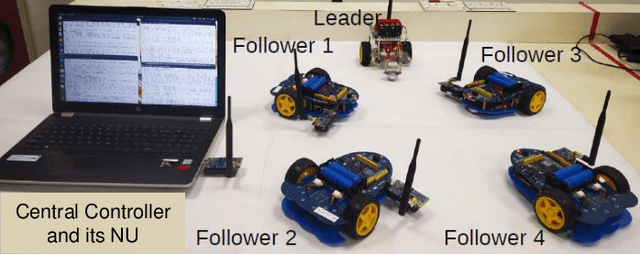
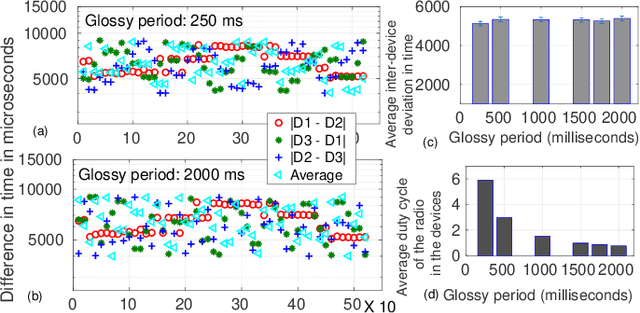
An efficient communication mechanism forms the backbone for any multi-robot system to achieve fruitful collaboration and coordination. Limitation in the existing asynchronous transmission based strategies in fast dissemination and aggregation compels the designers to prune down such requirements as much as possible. This also restricts the possible application areas of mobile multi-robot systems. In this work, we introduce concurrent transmission based strategy as an alternative. Despite the commonly found difficulties in concurrent transmission such as microsecond level time synchronization, hardware heterogeneity, etc., we demonstrate how it can be exploited for multi-robot systems. We propose a split architecture where the two major activities - communication and computation are carried out independently and coordinate through periodic interactions. The proposed split architecture is applied on a custom build full networked control system consisting of five two-wheel differential drive mobile robots having heterogeneous architecture. We use the proposed design in a leader-follower setting for coordinated dynamic speed variation as well as the independent formation of various shapes. Experiments show a centimeter-level spatial and millisecond-level temporal accuracy while spending very low radio duty-cycling over multi-hop communication under a wide testing area.