 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsensus-based Fast and Energy-Efficient Multi-Robot Task Allocation
Paper and Code
Sep 21, 2022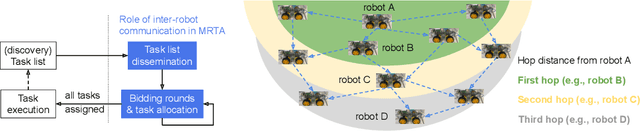
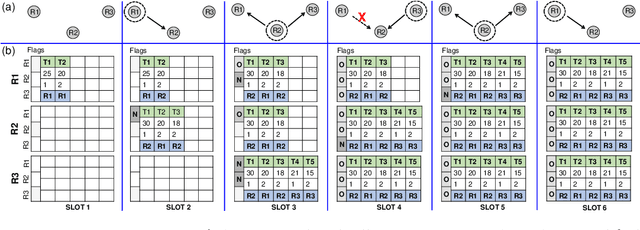
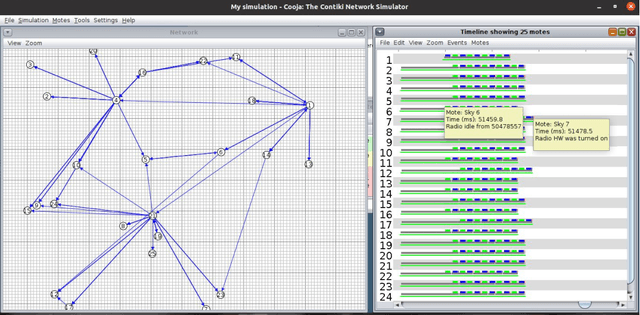
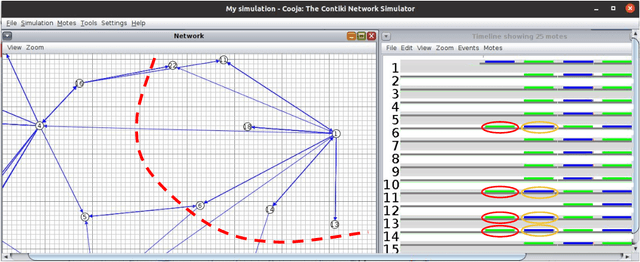
In a multi-robot system, the appropriate allocation of the tasks to the individual robots is a very significant component. The availability of a centralized infrastructure can guarantee an optimal allocation of the tasks. However, in many important scenarios such as search and rescue, exploration, disaster-management, war-field, etc., on-the-fly allocation of the dynamic tasks to the robots in a decentralized fashion is the only possible option. Efficient communication among the robots plays a crucial role in any such decentralized setting. Existing works on distributed Multi-Robot Task Allocation (MRTA) either assume that the network is available or a naive communication paradigm is used. On the contrary, in most of these scenarios, the network infrastructure is either unstable or unavailable and ad-hoc networking is the only resort. Recent developments in synchronous-transmission (ST) based wireless communication protocols are shown to be more efficient than the traditional asynchronous transmission-based protocols in ad hoc networks such as Wireless Sensor Network (WSN)/Internet of Things (IoT) applications. The current work is the first effort that utilizes ST for MRTA. Specifically, we propose an algorithm that efficiently adapts ST-based many-to-many interaction and minimizes the information exchange to reach a consensus for task allocation. We showcase the efficacy of the proposed algorithm through an extensive simulation-based study of its latency and energy-efficiency under different settings.