 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Learning of Camera Pose with Compositional Re-estimation
Jan 17, 2020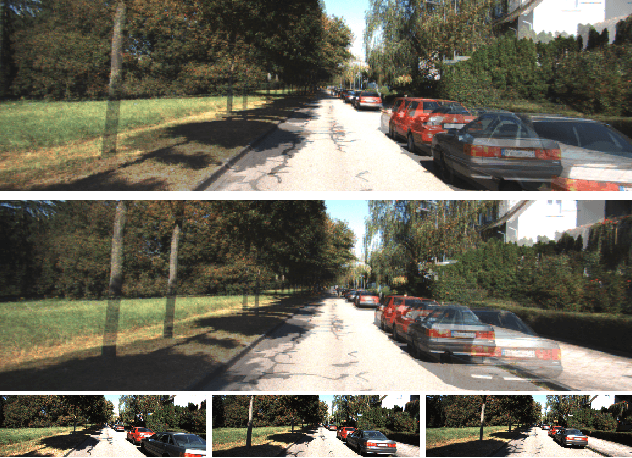
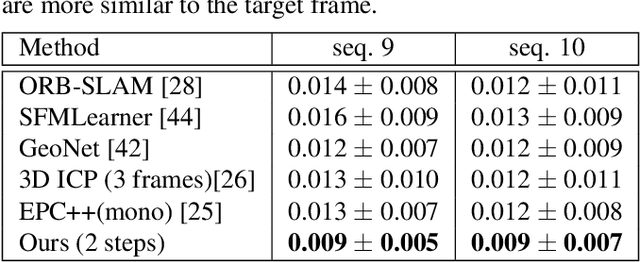
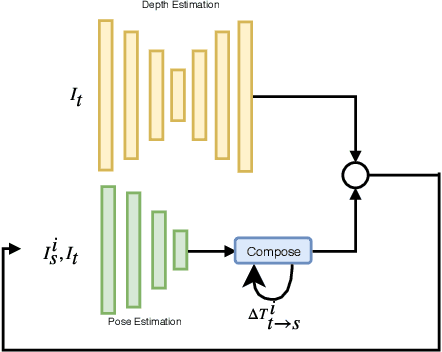
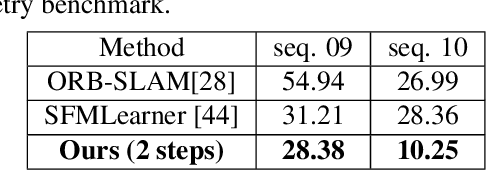
We consider the problem of unsupervised camera pose estimation. Given an input video sequence, our goal is to estimate the camera pose (i.e. the camera motion) between consecutive frames. Traditionally, this problem is tackled by placing strict constraints on the transformation vector or by incorporating optical flow through a complex pipeline. We propose an alternative approach that utilizes a compositional re-estimation process for camera pose estimation. Given an input, we first estimate a depth map. Our method then iteratively estimates the camera motion based on the estimated depth map. Our approach significantly improves the predicted camera motion both quantitatively and visually. Furthermore, the re-estimation resolves the problem of out-of-boundaries pixels in a novel and simple way. Another advantage of our approach is that it is adaptable to other camera pose estimation approaches. Experimental analysis on KITTI benchmark dataset demonstrates that our method outperforms existing state-of-the-art approaches in unsupervised camera ego-motion estimation.
SMILER: Saliency Model Implementation Library for Experimental Research
Dec 20, 2018
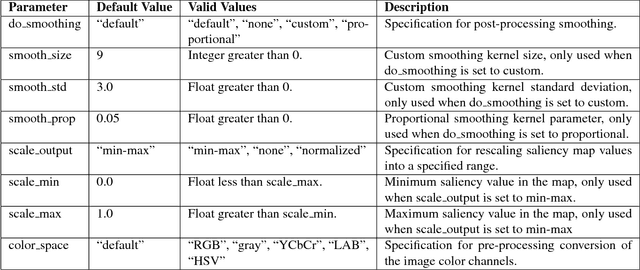
The Saliency Model Implementation Library for Experimental Research (SMILER) is a new software package which provides an open, standardized, and extensible framework for maintaining and executing computational saliency models. This work drastically reduces the human effort required to apply saliency algorithms to new tasks and datasets, while also ensuring consistency and procedural correctness for results and conclusions produced by different parties. At its launch SMILER already includes twenty three saliency models (fourteen models based in MATLAB and nine supported through containerization), and the open design of SMILER encourages this number to grow with future contributions from the community. The project may be downloaded and contributed to through its GitHub page: https://github.com/tsotsoslab/smiler