 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegPrompt: Using Segmentation Map as a Better Prompt to Finetune Deep Models for Kidney Stone Classification
Mar 15, 2023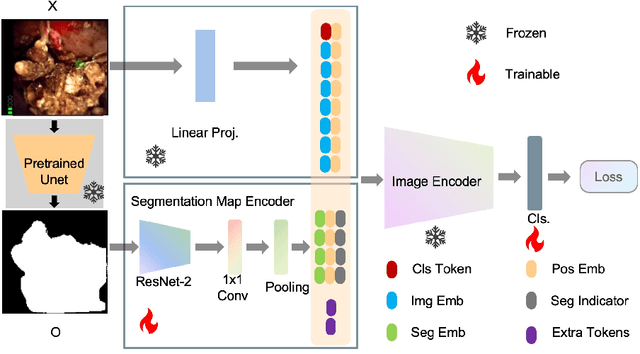
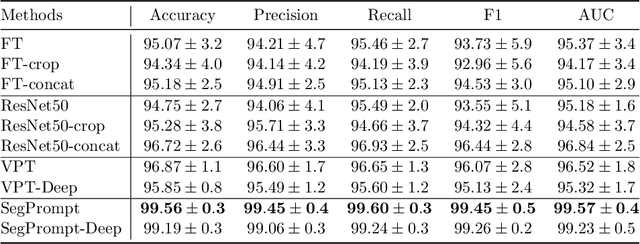
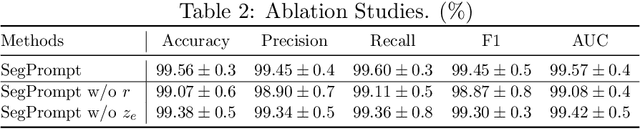
Recently, deep learning has produced encouraging results for kidney stone classification using endoscope images. However, the shortage of annotated training data poses a severe problem in improving the performance and generalization ability of the trained model. It is thus crucial to fully exploit the limited data at hand. In this paper, we propose SegPrompt to alleviate the data shortage problems by exploiting segmentation maps from two aspects. First, SegPrompt integrates segmentation maps to facilitate classification training so that the classification model is aware of the regions of interest. The proposed method allows the image and segmentation tokens to interact with each other to fully utilize the segmentation map information. Second, we use the segmentation maps as prompts to tune the pretrained deep model, resulting in much fewer trainable parameters than vanilla finetuning. We perform extensive experiments on the collected kidney stone dataset. The results show that SegPrompt can achieve an advantageous balance between the model fitting ability and the generalization ability, eventually leading to an effective model with limited training data.
A Maneuver-based Urban Driving Dataset and Model for Cooperative Vehicle Applications
Jun 08, 2020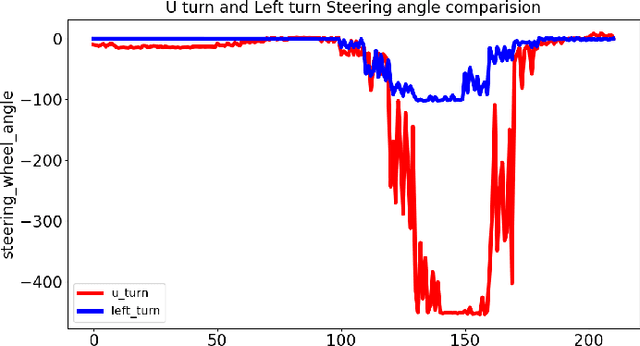
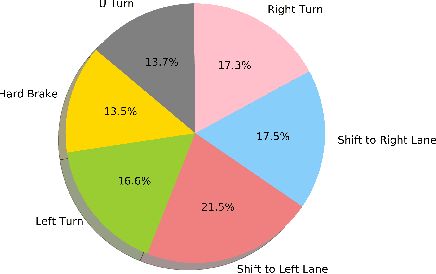
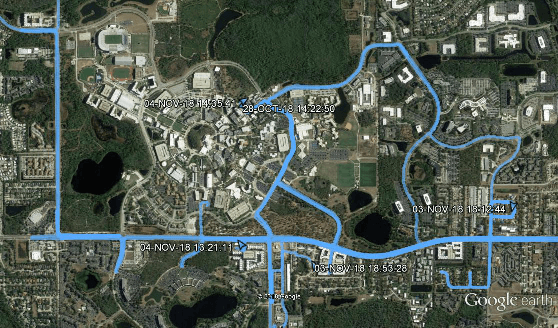
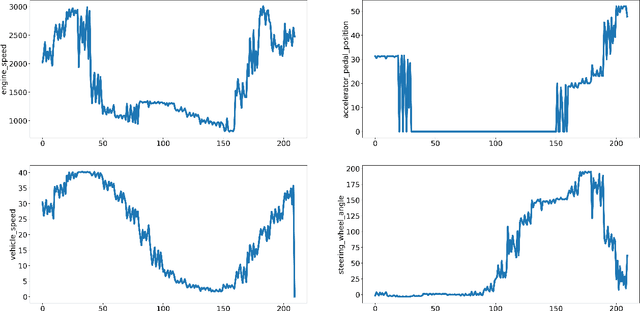
Short-term future of automated driving can be imagined as a hybrid scenario in which both automated and human-driven vehicles co-exist in the same environment. In order to address the needs of such road configuration, many technology solutions such as vehicular communication and predictive control for automated vehicles have been introduced in the literature. Both aforementioned solutions rely on driving data of the human driver. In this work, we investigate the currently available driving datasets and introduce a real-world maneuver-based driving dataset that is collected during our urban driving data collection campaign. We also provide a model that embeds the patterns in maneuver-specific samples. Such model can be employed for classification and prediction purposes.