 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Maneuver-based Urban Driving Dataset and Model for Cooperative Vehicle Applications
Jun 08, 2020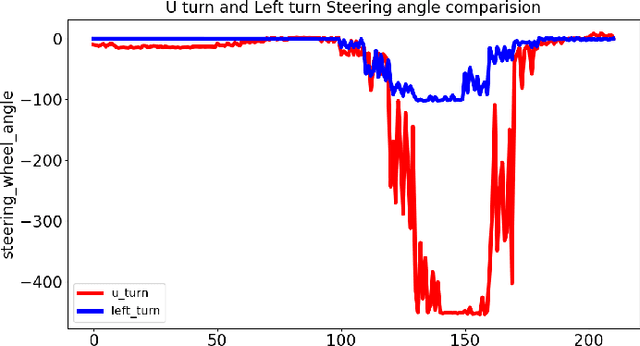
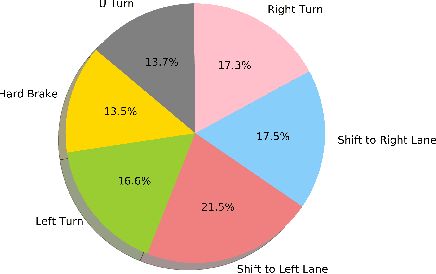
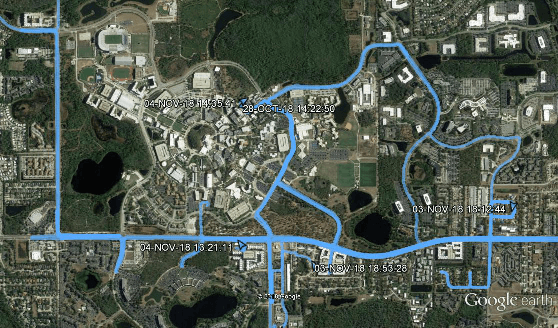
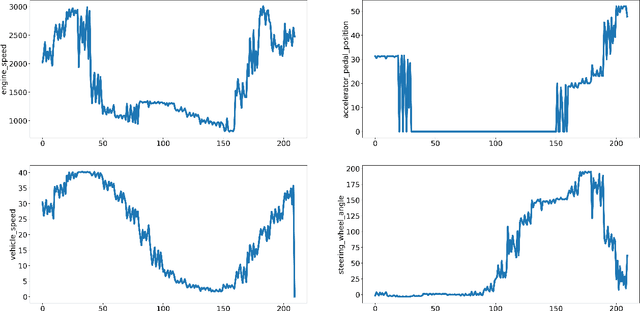
Short-term future of automated driving can be imagined as a hybrid scenario in which both automated and human-driven vehicles co-exist in the same environment. In order to address the needs of such road configuration, many technology solutions such as vehicular communication and predictive control for automated vehicles have been introduced in the literature. Both aforementioned solutions rely on driving data of the human driver. In this work, we investigate the currently available driving datasets and introduce a real-world maneuver-based driving dataset that is collected during our urban driving data collection campaign. We also provide a model that embeds the patterns in maneuver-specific samples. Such model can be employed for classification and prediction purposes.
MNIST Dataset Classification Utilizing k-NN Classifier with Modified Sliding Window Metric
Oct 02, 2018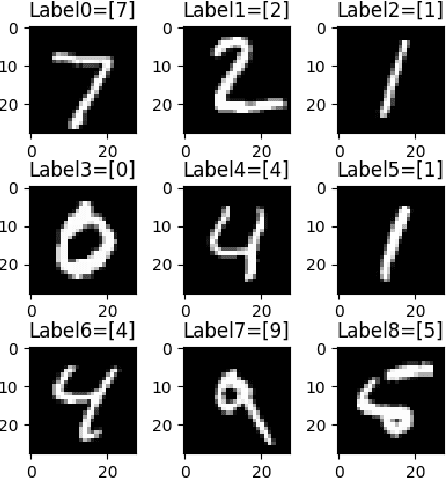
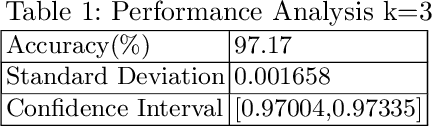
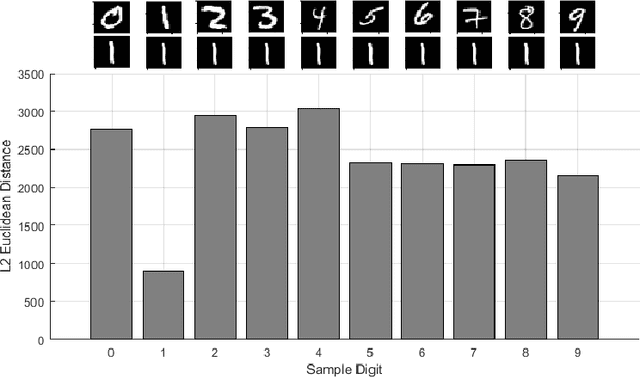

The MNIST dataset of the handwritten digits is known as one of the commonly used datasets for machine learning and computer vision research. We aim a widely applicable classification problem and apply a simple but still efficient K-nearest neighbor classifier with an enhanced heuristic. We evaluate the performance of the K-nearest neighbor classification algorithm on the MNIST dataset where the L2 Euclidean distance metric is compared to a modified distance metric which utilizes the sliding window technique in order to avoid performance degradation due to slight spatial misalignment. Accuracy metric and confusion matrices are used as the performance indicators to compare the performance of the baseline algorithm versus the enhanced sliding window method and results show significant improvement using this simple method.