 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinematic-Structure-Preserved Representation for Unsupervised 3D Human Pose Estimation
Jun 24, 2020
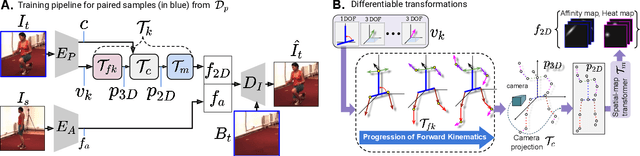
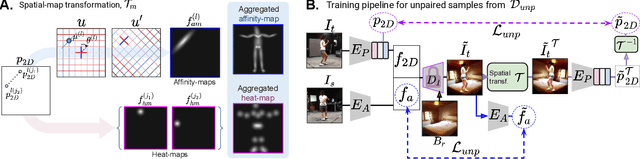
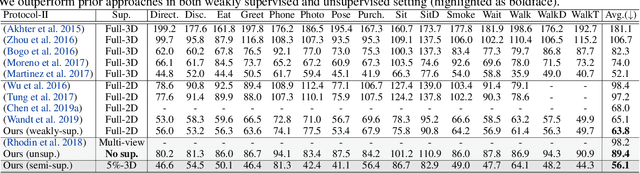
Estimation of 3D human pose from monocular image has gained considerable attention, as a key step to several human-centric applications. However, generalizability of human pose estimation models developed using supervision on large-scale in-studio datasets remains questionable, as these models often perform unsatisfactorily on unseen in-the-wild environments. Though weakly-supervised models have been proposed to address this shortcoming, performance of such models relies on availability of paired supervision on some related tasks, such as 2D pose or multi-view image pairs. In contrast, we propose a novel kinematic-structure-preserved unsupervised 3D pose estimation framework, which is not restrained by any paired or unpaired weak supervisions. Our pose estimation framework relies on a minimal set of prior knowledge that defines the underlying kinematic 3D structure, such as skeletal joint connectivity information with bone-length ratios in a fixed canonical scale. The proposed model employs three consecutive differentiable transformations named as forward-kinematics, camera-projection and spatial-map transformation. This design not only acts as a suitable bottleneck stimulating effective pose disentanglement but also yields interpretable latent pose representations avoiding training of an explicit latent embedding to pose mapper. Furthermore, devoid of unstable adversarial setup, we re-utilize the decoder to formalize an energy-based loss, which enables us to learn from in-the-wild videos, beyond laboratory settings. Comprehensive experiments demonstrate our state-of-the-art unsupervised and weakly-supervised pose estimation performance on both Human3.6M and MPI-INF-3DHP datasets. Qualitative results on unseen environments further establish our superior generalization ability.
Universal Source-Free Domain Adaptation
Apr 09, 2020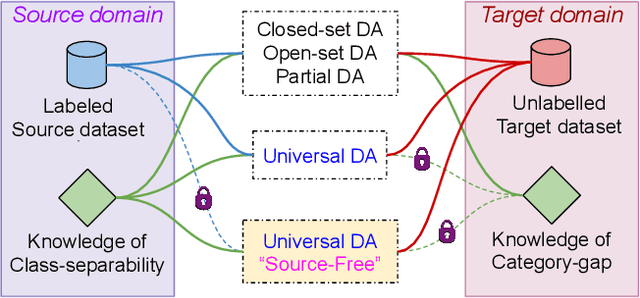
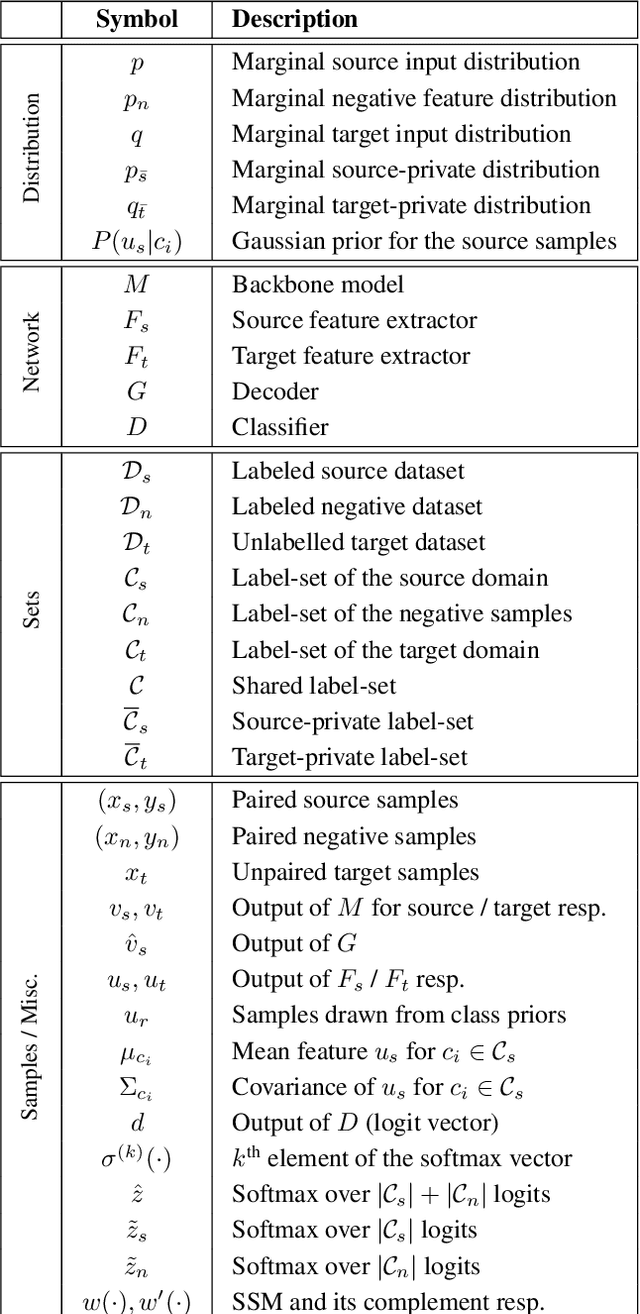
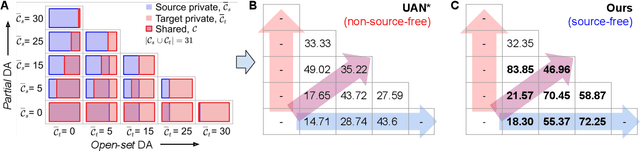
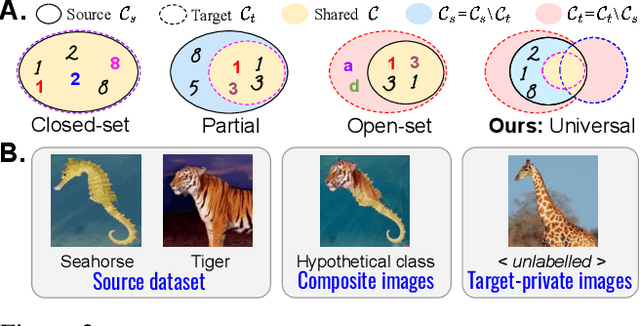
There is a strong incentive to develop versatile learning techniques that can transfer the knowledge of class-separability from a labeled source domain to an unlabeled target domain in the presence of a domain-shift. Existing domain adaptation (DA) approaches are not equipped for practical DA scenarios as a result of their reliance on the knowledge of source-target label-set relationship (e.g. Closed-set, Open-set or Partial DA). Furthermore, almost all prior unsupervised DA works require coexistence of source and target samples even during deployment, making them unsuitable for real-time adaptation. Devoid of such impractical assumptions, we propose a novel two-stage learning process. 1) In the Procurement stage, we aim to equip the model for future source-free deployment, assuming no prior knowledge of the upcoming category-gap and domain-shift. To achieve this, we enhance the model's ability to reject out-of-source distribution samples by leveraging the available source data, in a novel generative classifier framework. 2) In the Deployment stage, the goal is to design a unified adaptation algorithm capable of operating across a wide range of category-gaps, with no access to the previously seen source samples. To this end, in contrast to the usage of complex adversarial training regimes, we define a simple yet effective source-free adaptation objective by utilizing a novel instance-level weighting mechanism, named as Source Similarity Metric (SSM). A thorough evaluation shows the practical usability of the proposed learning framework with superior DA performance even over state-of-the-art source-dependent approaches.
Towards Inheritable Models for Open-Set Domain Adaptation
Apr 09, 2020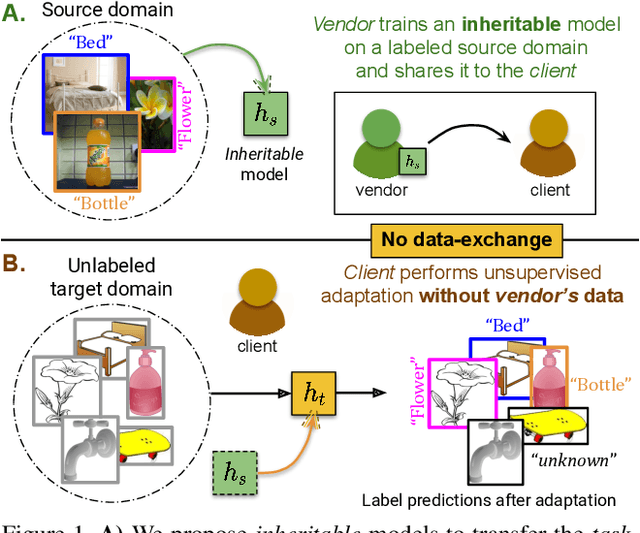
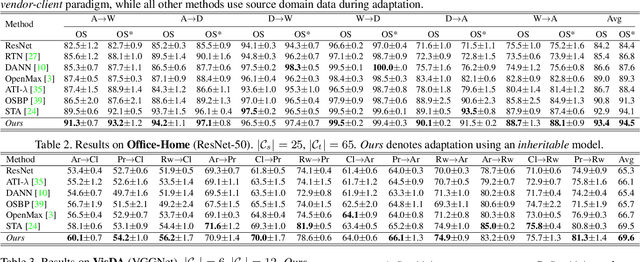
There has been a tremendous progress in Domain Adaptation (DA) for visual recognition tasks. Particularly, open-set DA has gained considerable attention wherein the target domain contains additional unseen categories. Existing open-set DA approaches demand access to a labeled source dataset along with unlabeled target instances. However, this reliance on co-existing source and target data is highly impractical in scenarios where data-sharing is restricted due to its proprietary nature or privacy concerns. Addressing this, we introduce a practical DA paradigm where a source-trained model is used to facilitate adaptation in the absence of the source dataset in future. To this end, we formalize knowledge inheritability as a novel concept and propose a simple yet effective solution to realize inheritable models suitable for the above practical paradigm. Further, we present an objective way to quantify inheritability to enable the selection of the most suitable source model for a given target domain, even in the absence of the source data. We provide theoretical insights followed by a thorough empirical evaluation demonstrating state-of-the-art open-set domain adaptation performance.