 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasping Student: semi-supervised learning for robotic manipulation
Mar 08, 2023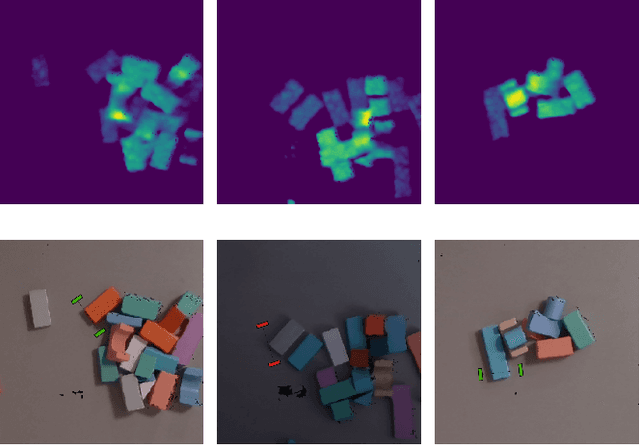
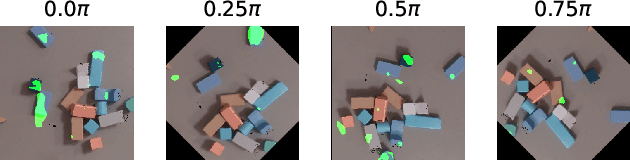
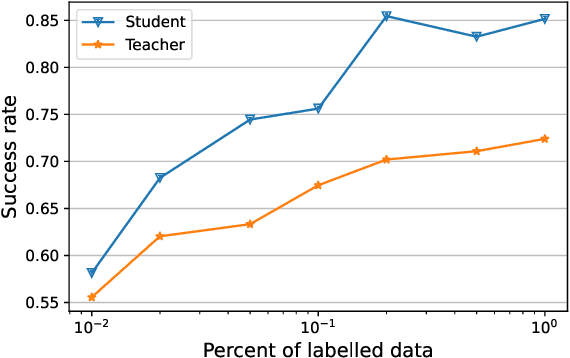
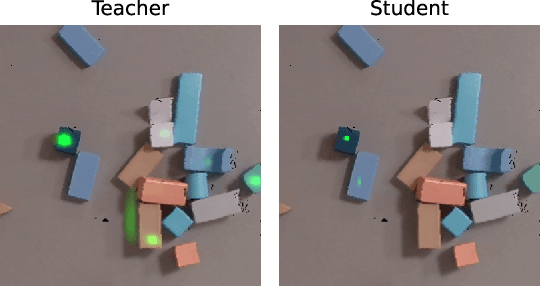
Gathering real-world data from the robot quickly becomes a bottleneck when constructing a robot learning system for grasping. In this work, we design a semi-supervised grasping system that, on top of a small sample of robot experience, takes advantage of images of products to be picked, which are collected without any interactions with the robot. We validate our findings both in the simulation and in the real world. In the regime of a small number of robot training samples, taking advantage of the unlabeled data allows us to achieve performance at the level of 10-fold bigger dataset size used by the baseline. The code and datasets used in the paper will be released at https://github.com/nomagiclab/grasping-student.
LIDL: Local Intrinsic Dimension Estimation Using Approximate Likelihood
Jun 29, 2022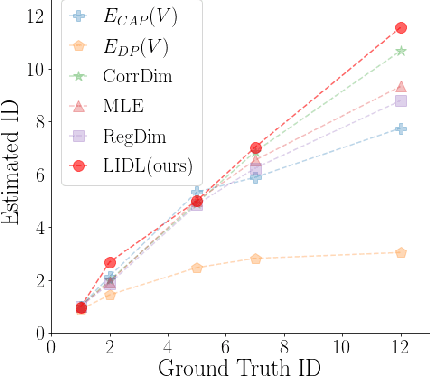

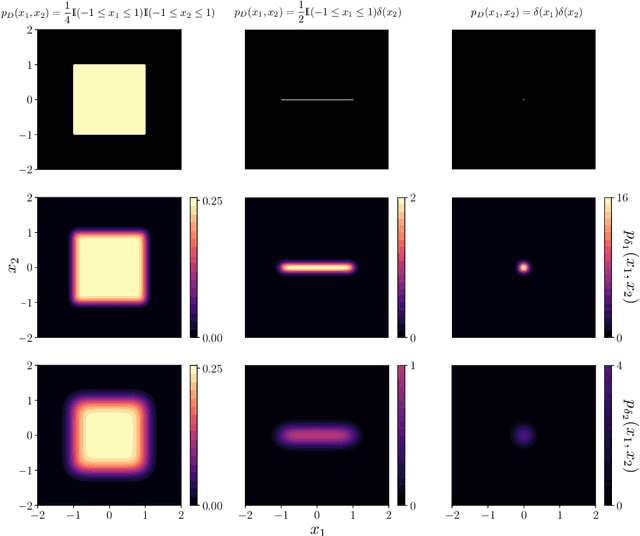
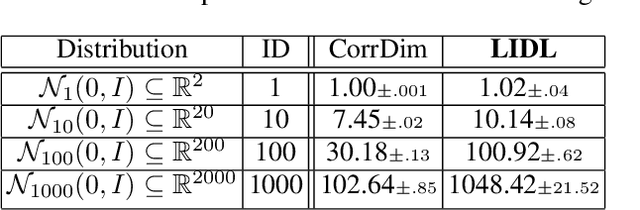
Most of the existing methods for estimating the local intrinsic dimension of a data distribution do not scale well to high-dimensional data. Many of them rely on a non-parametric nearest neighbors approach which suffers from the curse of dimensionality. We attempt to address that challenge by proposing a novel approach to the problem: Local Intrinsic Dimension estimation using approximate Likelihood (LIDL). Our method relies on an arbitrary density estimation method as its subroutine and hence tries to sidestep the dimensionality challenge by making use of the recent progress in parametric neural methods for likelihood estimation. We carefully investigate the empirical properties of the proposed method, compare them with our theoretical predictions, and show that LIDL yields competitive results on the standard benchmarks for this problem and that it scales to thousands of dimensions. What is more, we anticipate this approach to improve further with the continuing advances in the density estimation literature.