 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKine2Go: Kinematic dataset for the Unitree Go2 robot with diverse gaits and motions
Jun 12, 2026The recent popularity of robotics, combined with the steadily decreasing cost of robotic hardware, has lowered the entry barrier to robotics research and enabled rapid advancements in the field. One of the primary examples is the Unitree Go2 quadruped robot, which is often used by researchers in the areas of locomotion, navigation, control, and others. Many researchers use the Go2 robot in combination with techniques like imitation learning, reinforcement learning, and behavioral cloning to allow machine learning systems to take full control of the robot. At the same time, many of those techniques require demonstration data consisting of the robot's kinematics information and actions applied to the motors. Obtaining such data is difficult, requires building complex pipelines, and can take significant time. To aid in those kinds of efforts, we present Kine2Go - a dataset with 800 diverse gait kinematics trajectory motion data for the Unitree Go2 robot, derived from 40 distinct policies. Our pipeline accepts data from various quadruped morphologies and translates them to a Go2-compatible format. Then we use Reinforcement Learning to train policies following a given motion, and finally we gather data from those policies, which grants robust, perturbed kinematic data with corresponding motor-level actions.
RoboMorph: Evolving Robot Morphology using Large Language Models
Jul 11, 2024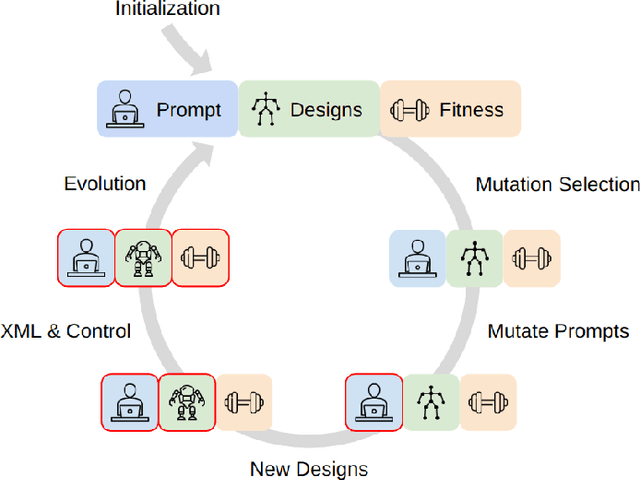
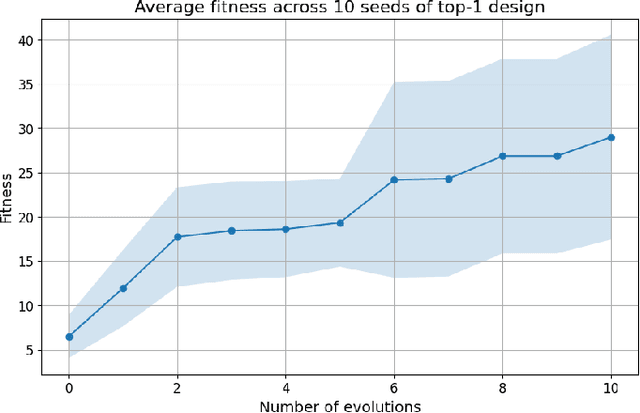
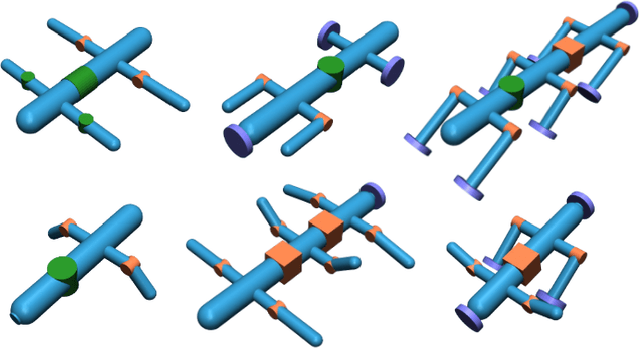
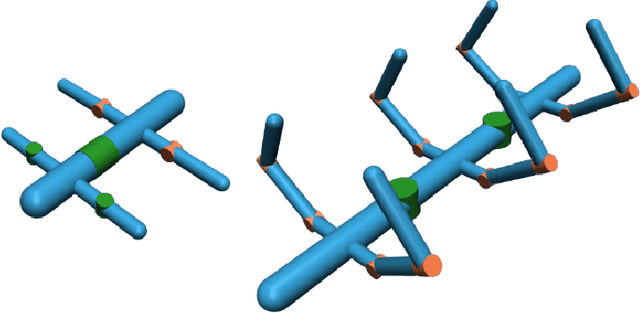
We introduce RoboMorph, an automated approach for generating and optimizing modular robot designs using large language models (LLMs) and evolutionary algorithms. In this framework, we represent each robot design as a grammar and leverage the capabilities of LLMs to navigate the extensive robot design space, which is traditionally time-consuming and computationally demanding. By integrating automatic prompt design and a reinforcement learning based control algorithm, RoboMorph iteratively improves robot designs through feedback loops. Our experimental results demonstrate that RoboMorph can successfully generate nontrivial robots that are optimized for a single terrain while showcasing improvements in morphology over successive evolutions. Our approach demonstrates the potential of using LLMs for data-driven and modular robot design, providing a promising methodology that can be extended to other domains with similar design frameworks.
Grasping Student: semi-supervised learning for robotic manipulation
Mar 08, 2023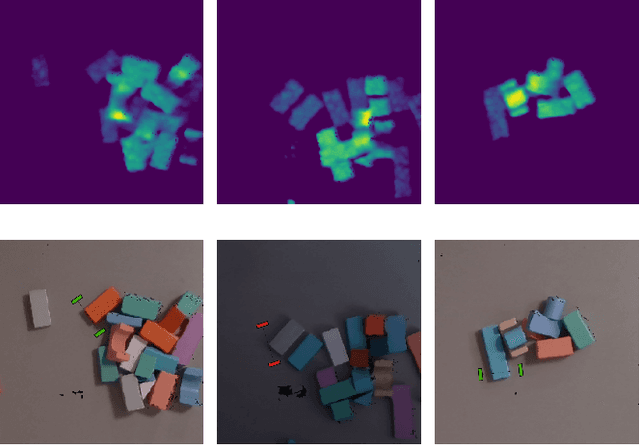
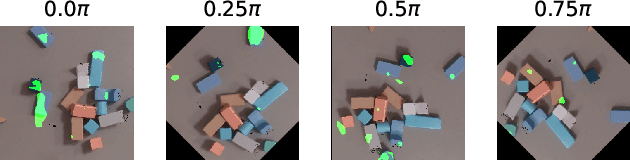
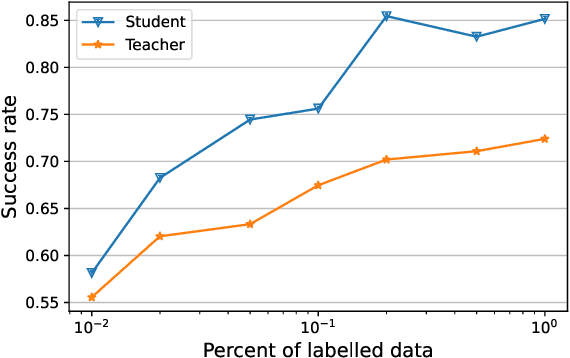
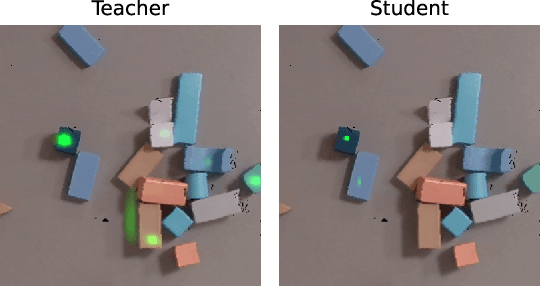
Gathering real-world data from the robot quickly becomes a bottleneck when constructing a robot learning system for grasping. In this work, we design a semi-supervised grasping system that, on top of a small sample of robot experience, takes advantage of images of products to be picked, which are collected without any interactions with the robot. We validate our findings both in the simulation and in the real world. In the regime of a small number of robot training samples, taking advantage of the unlabeled data allows us to achieve performance at the level of 10-fold bigger dataset size used by the baseline. The code and datasets used in the paper will be released at https://github.com/nomagiclab/grasping-student.