 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAD: Retrieval-Augmented Decision-Making of Meta-Actions with Vision-Language Models in Autonomous Driving
Mar 18, 2025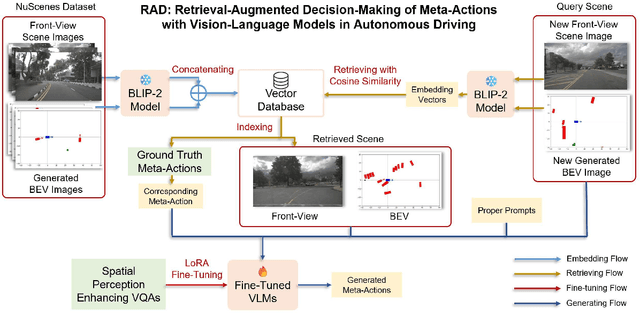
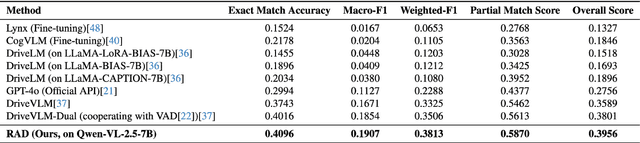
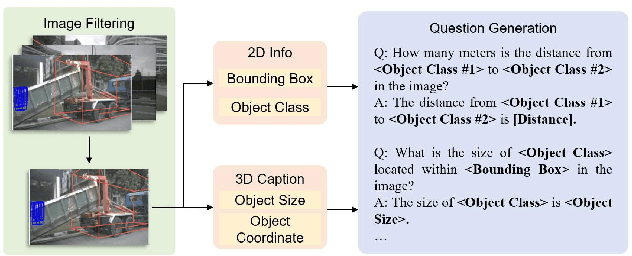
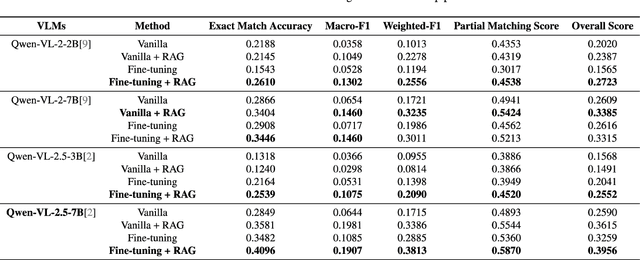
Accurately understanding and deciding high-level meta-actions is essential for ensuring reliable and safe autonomous driving systems. While vision-language models (VLMs) have shown significant potential in various autonomous driving tasks, they often suffer from limitations such as inadequate spatial perception and hallucination, reducing their effectiveness in complex autonomous driving scenarios. To address these challenges, we propose a retrieval-augmented decision-making (RAD) framework, a novel architecture designed to enhance VLMs' capabilities to reliably generate meta-actions in autonomous driving scenes. RAD leverages a retrieval-augmented generation (RAG) pipeline to dynamically improve decision accuracy through a three-stage process consisting of the embedding flow, retrieving flow, and generating flow. Additionally, we fine-tune VLMs on a specifically curated dataset derived from the NuScenes dataset to enhance their spatial perception and bird's-eye view image comprehension capabilities. Extensive experimental evaluations on the curated NuScenes-based dataset demonstrate that RAD outperforms baseline methods across key evaluation metrics, including match accuracy, and F1 score, and self-defined overall score, highlighting its effectiveness in improving meta-action decision-making for autonomous driving tasks.
RAC3: Retrieval-Augmented Corner Case Comprehension for Autonomous Driving with Vision-Language Models
Dec 15, 2024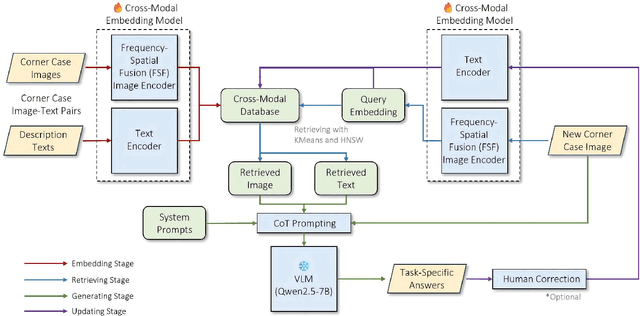
Understanding and addressing corner cases is essential for ensuring the safety and reliability of autonomous driving systems. Vision-Language Models (VLMs) play a crucial role in enhancing scenario comprehension, yet they face significant challenges, such as hallucination and insufficient real-world grounding, which compromise their performance in critical driving scenarios. In this work, we propose RAC3, a novel framework designed to improve VLMs' ability to handle corner cases effectively. The framework integrates Retrieval-Augmented Generation (RAG) to mitigate hallucination by dynamically incorporating context-specific external knowledge. A cornerstone of RAC3 is its cross-modal alignment fine-tuning, which utilizes contrastive learning to embed image-text pairs into a unified semantic space, enabling robust retrieval of similar scenarios. We evaluate RAC3 through extensive experiments using a curated dataset of corner case scenarios, demonstrating its ability to enhance semantic alignment, improve hallucination mitigation, and achieve superior performance metrics, such as Cosine Similarity and ROUGE-L scores. For example, for the LLaVA-v1.6-34B VLM, the cosine similarity between the generated text and the reference text has increased by 5.22\%. The F1-score in ROUGE-L has increased by 39.91\%, the Precision has increased by 55.80\%, and the Recall has increased by 13.74\%. This work underscores the potential of retrieval-augmented VLMs to advance the robustness and safety of autonomous driving in complex environments.