 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-iterative Simultaneous Rigid Registration Method for Serial Sections of Biological Tissue
May 11, 2020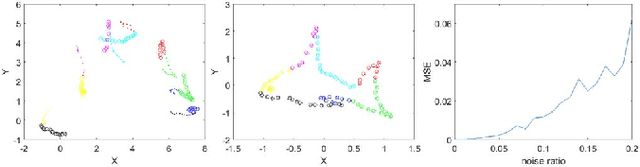
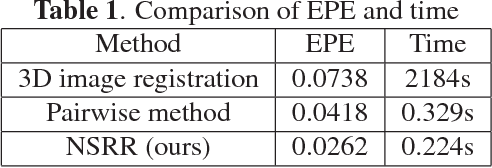
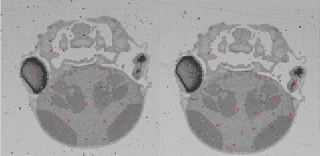
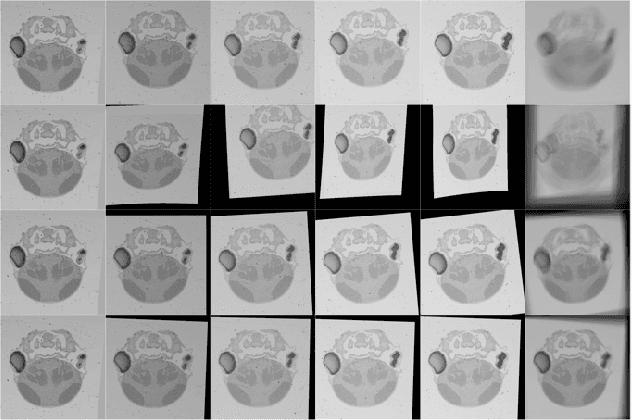
In this paper, we propose a novel non-iterative algorithm to simultaneously estimate optimal rigid transformation for serial section images, which is a key component in volume reconstruction of serial sections of biological tissue. In order to avoid error accumulation and propagation caused by current algorithms, we add extra condition that the position of the first and the last section images should remain unchanged. This constrained simultaneous registration problem has not been solved before. Our algorithm method is non-iterative, it can simultaneously compute rigid transformation for a large number of serial section images in a short time. We prove that our algorithm gets optimal solution under ideal condition. And we test our algorithm with synthetic data and real data to verify our algorithm's effectiveness.
* appears in IEEE International Symposium on Biomedical Imaging 2018 (ISBI 2018)
A Robust Real-Time Computing-based Environment Sensing System for Intelligent Vehicle
Jan 27, 2020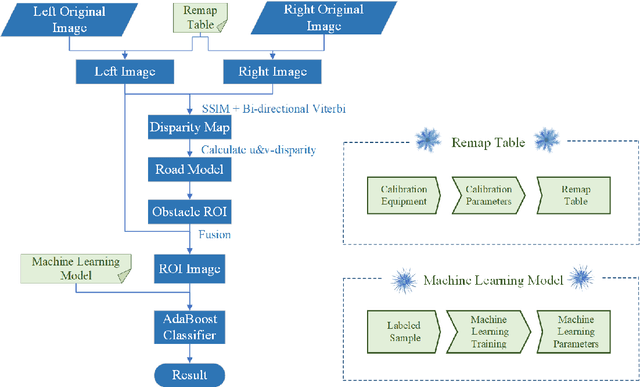
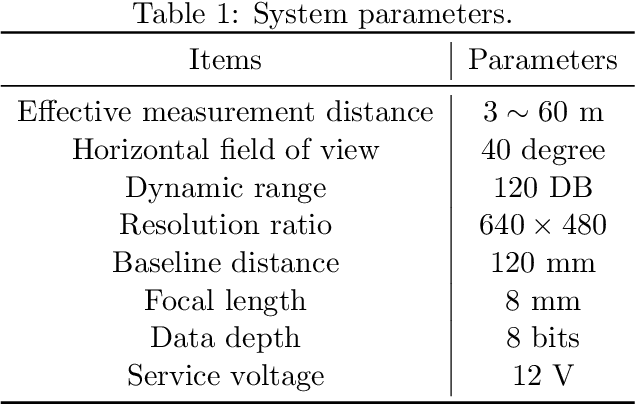
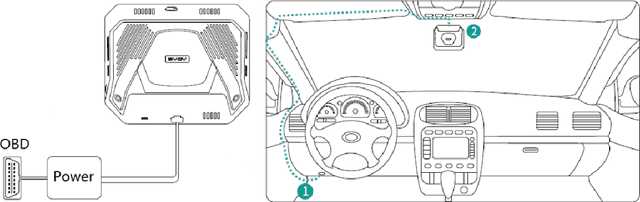

For intelligent vehicles, sensing the 3D environment is the first but crucial step. In this paper, we build a real-time advanced driver assistance system based on a low-power mobile platform. The system is a real-time multi-scheme integrated innovation system, which combines stereo matching algorithm with machine learning based obstacle detection approach and takes advantage of the distributed computing technology of a mobile platform with GPU and CPUs. First of all, a multi-scale fast MPV (Multi-Path-Viterbi) stereo matching algorithm is proposed, which can generate robust and accurate disparity map. Then a machine learning, which is based on fusion technology of monocular and binocular, is applied to detect the obstacles. We also advance an automatic fast calibration mechanism based on Zhang's calibration method. Finally, the distributed computing and reasonable data flow programming are applied to ensure the operational efficiency of the system. The experimental results show that the system can achieve robust and accurate real-time environment perception for intelligent vehicles, which can be directly used in the commercial real-time intelligent driving applications.
Principal Model Analysis Based on Partial Least Squares
Feb 06, 2019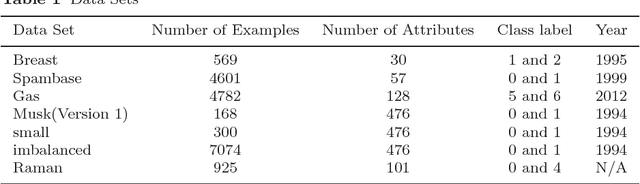
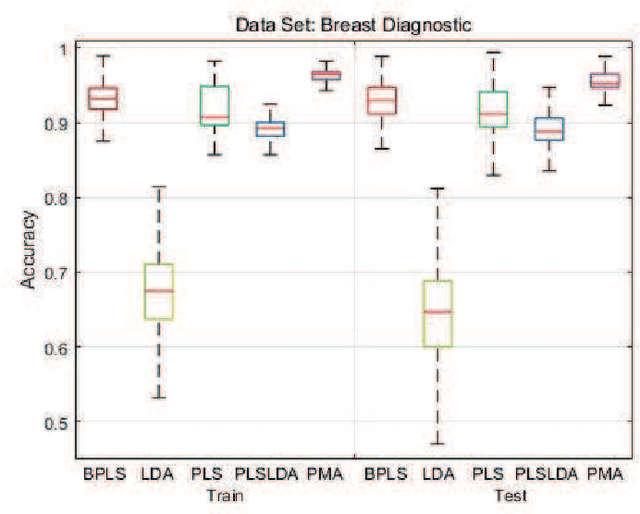
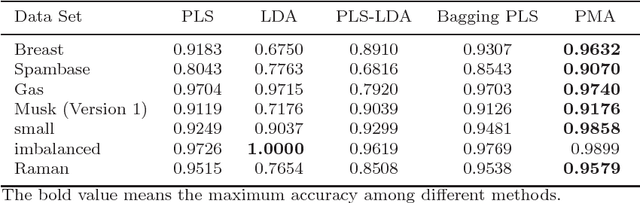
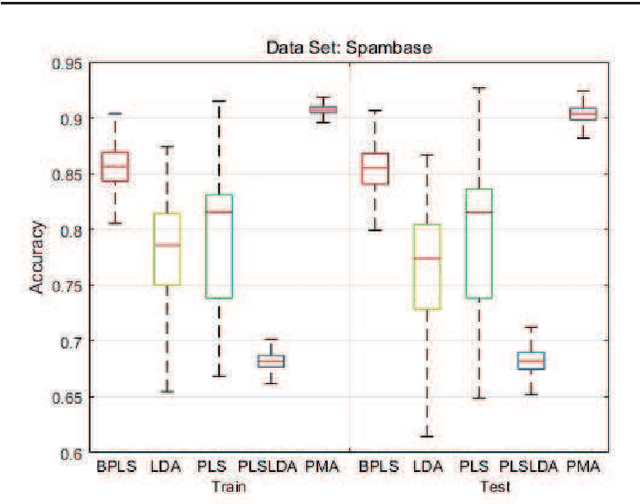
Motivated by the Bagging Partial Least Squares (PLS) and Principal Component Analysis (PCA) algorithms, we propose a Principal Model Analysis (PMA) method in this paper. In the proposed PMA algorithm, the PCA and the PLS are combined. In the method, multiple PLS models are trained on sub-training sets, derived from the original training set based on the random sampling with replacement method. The regression coefficients of all the sub-PLS models are fused in a joint regression coefficient matrix. The final projection direction is then estimated by performing the PCA on the joint regression coefficient matrix. The proposed PMA method is compared with other traditional dimension reduction methods, such as PLS, Bagging PLS, Linear discriminant analysis (LDA) and PLS-LDA. Experimental results on six public datasets show that our proposed method can achieve better classification performance and is usually more stable.
Hierarchical Spatial Transformer Network
Jan 30, 2018
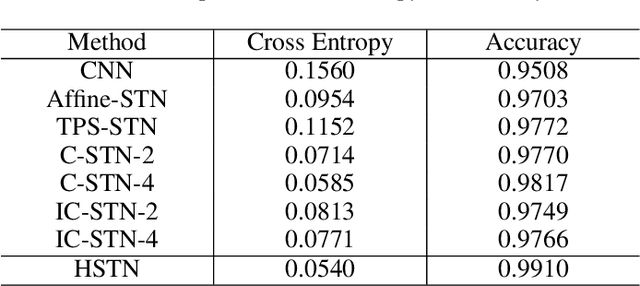
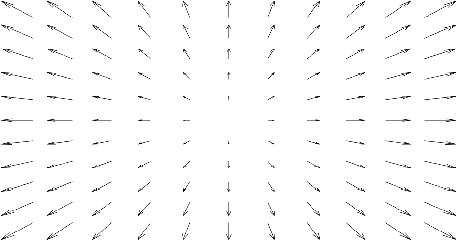
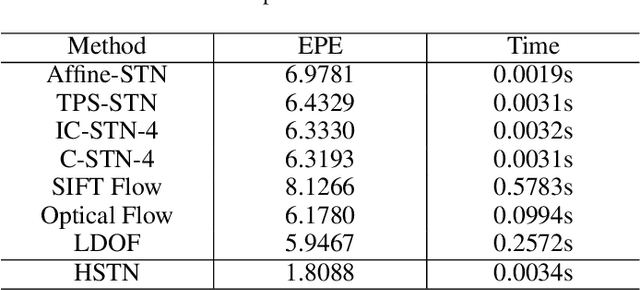
Computer vision researchers have been expecting that neural networks have spatial transformation ability to eliminate the interference caused by geometric distortion for a long time. Emergence of spatial transformer network makes dream come true. Spatial transformer network and its variants can handle global displacement well, but lack the ability to deal with local spatial variance. Hence how to achieve a better manner of deformation in the neural network has become a pressing matter of the moment. To address this issue, we analyze the advantages and disadvantages of approximation theory and optical flow theory, then we combine them to propose a novel way to achieve image deformation and implement it with a hierarchical convolutional neural network. This new approach solves for a linear deformation along with an optical flow field to model image deformation. In the experiments of cluttered MNIST handwritten digits classification and image plane alignment, our method outperforms baseline methods by a large margin.