 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThinker: Training LLMs in Hierarchical Thinking for Deep Search via Multi-Turn Interaction
Nov 14, 2025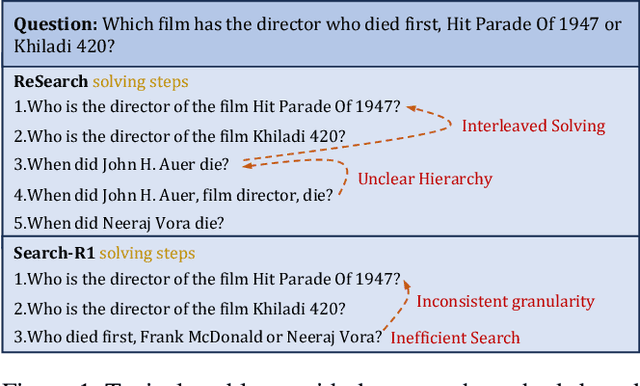
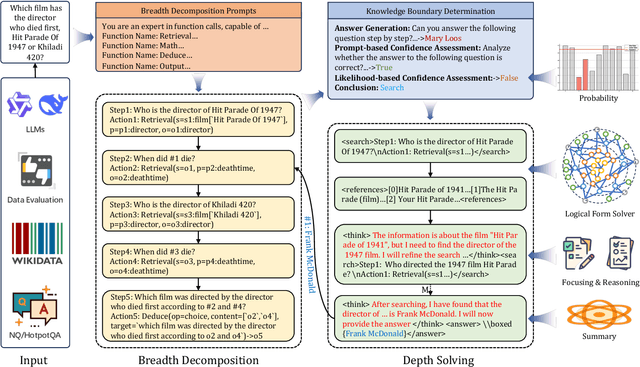
Efficient retrieval of external knowledge bases and web pages is crucial for enhancing the reasoning abilities of LLMs. Previous works on training LLMs to leverage external retrievers for solving complex problems have predominantly employed end-to-end reinforcement learning. However, these approaches neglect supervision over the reasoning process, making it difficult to guarantee logical coherence and rigor. To address these limitations, we propose Thinker, a hierarchical thinking model for deep search through multi-turn interaction, making the reasoning process supervisable and verifiable. It decomposes complex problems into independently solvable sub-problems, each dually represented in both natural language and an equivalent logical function to support knowledge base and web searches. Concurrently, dependencies between sub-problems are passed as parameters via these logical functions, enhancing the logical coherence of the problem-solving process. To avoid unnecessary external searches, we perform knowledge boundary determination to check if a sub-problem is within the LLM's intrinsic knowledge, allowing it to answer directly. Experimental results indicate that with as few as several hundred training samples, the performance of Thinker is competitive with established baselines. Furthermore, when scaled to the full training set, Thinker significantly outperforms these methods across various datasets and model sizes. The source code is available at https://github.com/OpenSPG/KAG-Thinker.
FROG: Effective Friend Recommendation in Online Games via Modality-aware User Preferences
Apr 13, 2025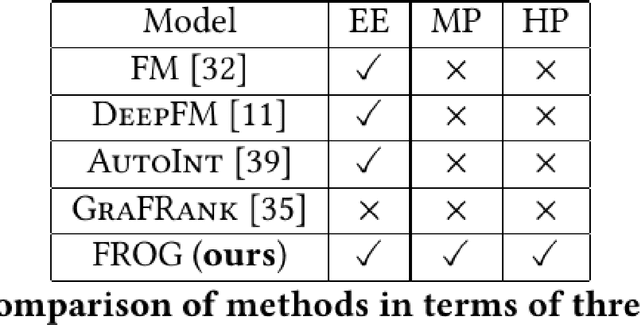
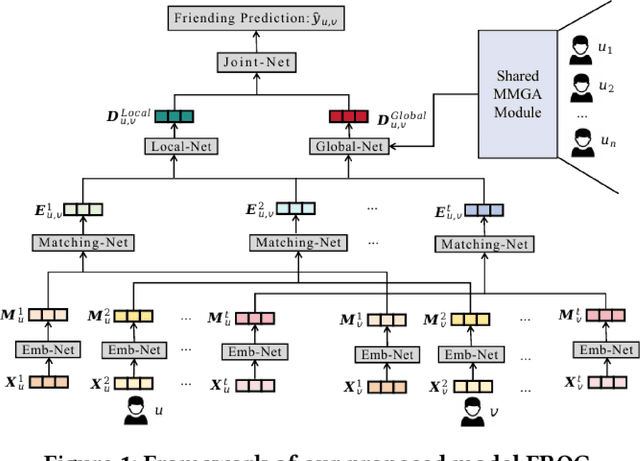

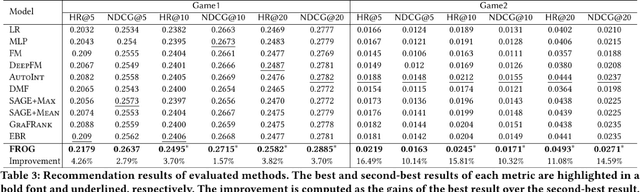
Due to the convenience of mobile devices, the online games have become an important part for user entertainments in reality, creating a demand for friend recommendation in online games. However, none of existing approaches can effectively incorporate the multi-modal user features (\emph{e.g.}, images and texts) with the structural information in the friendship graph, due to the following limitations: (1) some of them ignore the high-order structural proximity between users, (2) some fail to learn the pairwise relevance between users at modality-specific level, and (3) some cannot capture both the local and global user preferences on different modalities. By addressing these issues, in this paper, we propose an end-to-end model \textsc{FROG} that better models the user preferences on potential friends. Comprehensive experiments on both offline evaluation and online deployment at \kw{Tencent} have demonstrated the superiority of \textsc{FROG} over existing approaches.
BevSplat: Resolving Height Ambiguity via Feature-Based Gaussian Primitives for Weakly-Supervised Cross-View Localization
Feb 13, 2025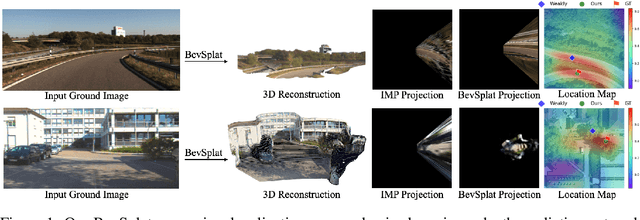
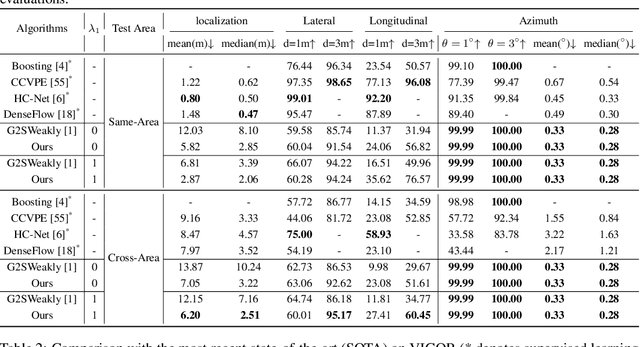
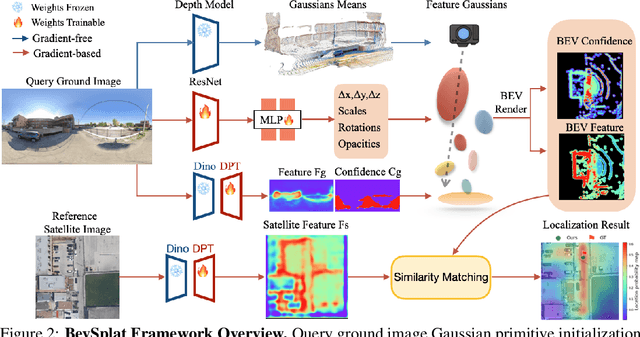
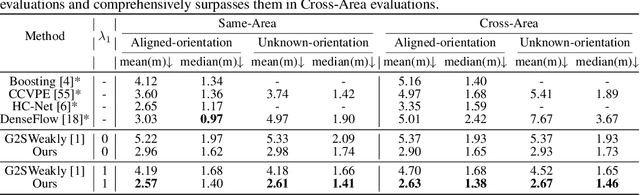
This paper addresses the problem of weakly supervised cross-view localization, where the goal is to estimate the pose of a ground camera relative to a satellite image with noisy ground truth annotations. A common approach to bridge the cross-view domain gap for pose estimation is Bird's-Eye View (BEV) synthesis. However, existing methods struggle with height ambiguity due to the lack of depth information in ground images and satellite height maps. Previous solutions either assume a flat ground plane or rely on complex models, such as cross-view transformers. We propose BevSplat, a novel method that resolves height ambiguity by using feature-based Gaussian primitives. Each pixel in the ground image is represented by a 3D Gaussian with semantic and spatial features, which are synthesized into a BEV feature map for relative pose estimation. Additionally, to address challenges with panoramic query images, we introduce an icosphere-based supervision strategy for the Gaussian primitives. We validate our method on the widely used KITTI and VIGOR datasets, which include both pinhole and panoramic query images. Experimental results show that BevSplat significantly improves localization accuracy over prior approaches.
Controllable Satellite-to-Street-View Synthesis with Precise Pose Alignment and Zero-Shot Environmental Control
Feb 05, 2025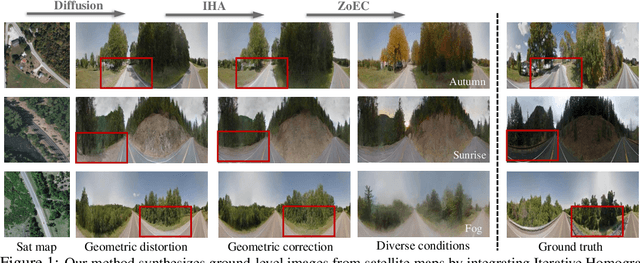
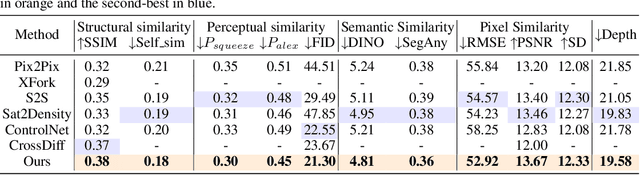
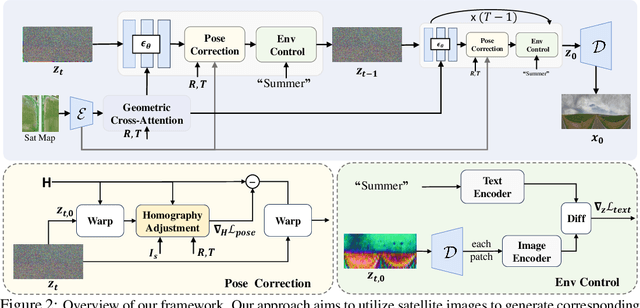
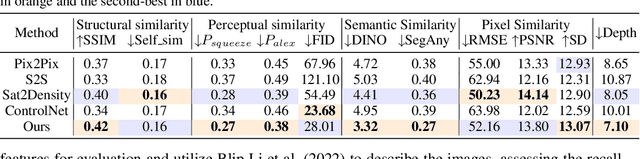
Generating street-view images from satellite imagery is a challenging task, particularly in maintaining accurate pose alignment and incorporating diverse environmental conditions. While diffusion models have shown promise in generative tasks, their ability to maintain strict pose alignment throughout the diffusion process is limited. In this paper, we propose a novel Iterative Homography Adjustment (IHA) scheme applied during the denoising process, which effectively addresses pose misalignment and ensures spatial consistency in the generated street-view images. Additionally, currently, available datasets for satellite-to-street-view generation are limited in their diversity of illumination and weather conditions, thereby restricting the generalizability of the generated outputs. To mitigate this, we introduce a text-guided illumination and weather-controlled sampling strategy that enables fine-grained control over the environmental factors. Extensive quantitative and qualitative evaluations demonstrate that our approach significantly improves pose accuracy and enhances the diversity and realism of generated street-view images, setting a new benchmark for satellite-to-street-view generation tasks.
Double-decker: Productive Backscatter Communication Using a Single Commodity Receiver
Aug 29, 2024



Backscatter communication has attracted significant attention for Internet-of-Things applications due to its ultra-low-power consumption. The state-of-the-art backscatter systems no longer require dedicated carrier generators and leverage ambient signals as carriers. However, there is an emerging challenge: most prior systems need dual receivers to capture the original and backscattered signals at the same time for tag data demodulation. This is not conducive to the widespread deployment of backscatter communication. To address this problem, we present double-decker, a novel backscatter system that only requires a single commercial device for backscatter communication. The key technology of double-decker is to divide the carrier OFDM symbols into two parts, which are pilot symbols and data symbols. Pilot symbols can be used as reference signals for tag data demodulation, thus getting rid of the dependence on the dual receiver structure. We have built an FPGA prototype and conducted extensive experiments. Empirical results show that when the excitation signal is 802.11g, double-decker achieves a tag data rate of 35.2kbps and a productive data rate of 38kbps, respectively. The communication range of double-decker is up to 28m in LOS deployment and 24m in NLOS deployment.