 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControllable Satellite-to-Street-View Synthesis with Precise Pose Alignment and Zero-Shot Environmental Control
Feb 05, 2025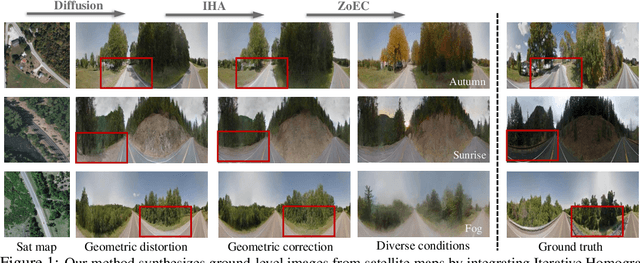
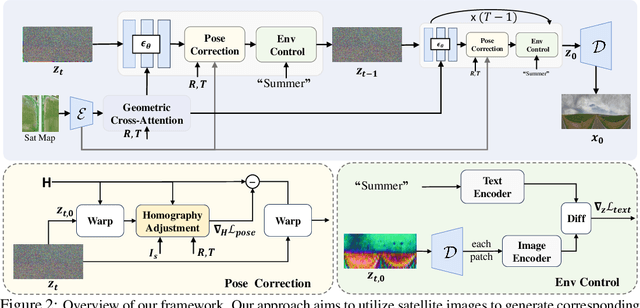
Generating street-view images from satellite imagery is a challenging task, particularly in maintaining accurate pose alignment and incorporating diverse environmental conditions. While diffusion models have shown promise in generative tasks, their ability to maintain strict pose alignment throughout the diffusion process is limited. In this paper, we propose a novel Iterative Homography Adjustment (IHA) scheme applied during the denoising process, which effectively addresses pose misalignment and ensures spatial consistency in the generated street-view images. Additionally, currently, available datasets for satellite-to-street-view generation are limited in their diversity of illumination and weather conditions, thereby restricting the generalizability of the generated outputs. To mitigate this, we introduce a text-guided illumination and weather-controlled sampling strategy that enables fine-grained control over the environmental factors. Extensive quantitative and qualitative evaluations demonstrate that our approach significantly improves pose accuracy and enhances the diversity and realism of generated street-view images, setting a new benchmark for satellite-to-street-view generation tasks.
Learning Dense Flow Field for Highly-accurate Cross-view Camera Localization
Sep 27, 2023



This paper addresses the problem of estimating the 3-DoF camera pose for a ground-level image with respect to a satellite image that encompasses the local surroundings. We propose a novel end-to-end approach that leverages the learning of dense pixel-wise flow fields in pairs of ground and satellite images to calculate the camera pose. Our approach differs from existing methods by constructing the feature metric at the pixel level, enabling full-image supervision for learning distinctive geometric configurations and visual appearances across views. Specifically, our method employs two distinct convolution networks for ground and satellite feature extraction. Then, we project the ground feature map to the bird's eye view (BEV) using a fixed camera height assumption to achieve preliminary geometric alignment. To further establish content association between the BEV and satellite features, we introduce a residual convolution block to refine the projected BEV feature. Optical flow estimation is performed on the refined BEV feature map and the satellite feature map using flow decoder networks based on RAFT. After obtaining dense flow correspondences, we apply the least square method to filter matching inliers and regress the ground camera pose. Extensive experiments demonstrate significant improvements compared to state-of-the-art methods. Notably, our approach reduces the median localization error by 89%, 19%, 80% and 35% on the KITTI, Ford multi-AV, VIGOR and Oxford RobotCar datasets, respectively.