 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Generate Cross-Task Unexploitable Examples
Dec 15, 2025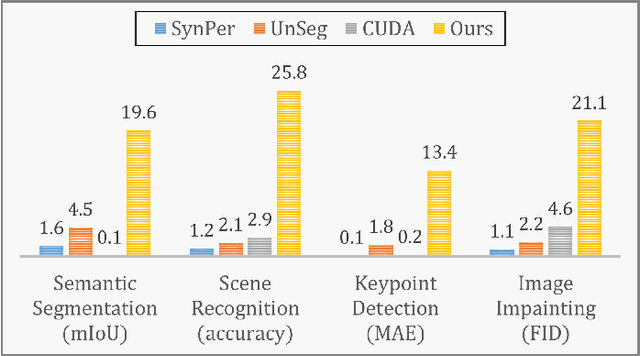
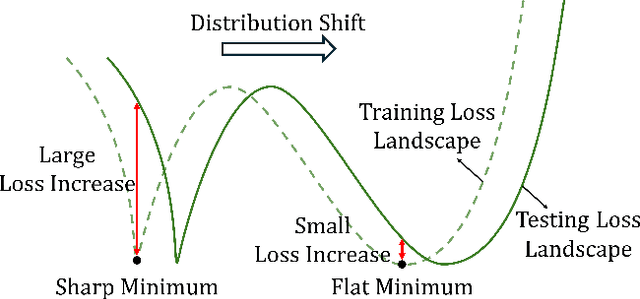
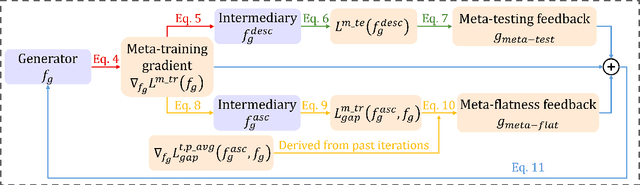
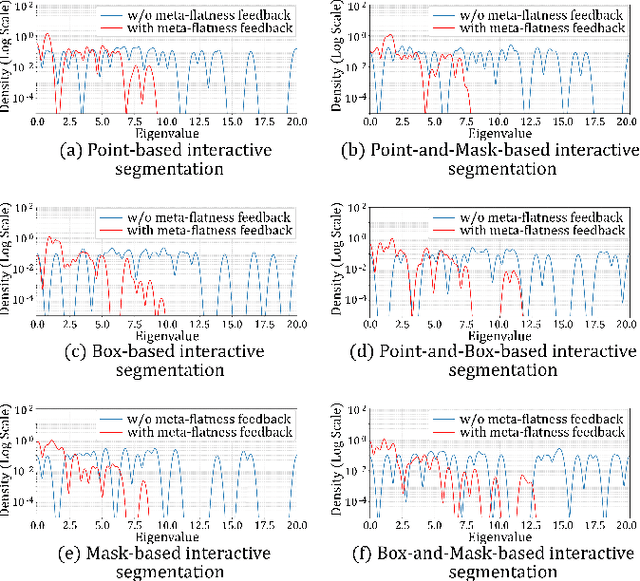
Unexploitable example generation aims to transform personal images into their unexploitable (unlearnable) versions before they are uploaded online, thereby preventing unauthorized exploitation of online personal images. Recently, this task has garnered significant research attention due to its critical relevance to personal data privacy. Yet, despite recent progress, existing methods for this task can still suffer from limited practical applicability, as they can fail to generate examples that are broadly unexploitable across different real-world computer vision tasks. To deal with this problem, in this work, we propose a novel Meta Cross-Task Unexploitable Example Generation (MCT-UEG) framework. At the core of our framework, to optimize the unexploitable example generator for effectively producing broadly unexploitable examples, we design a flat-minima-oriented meta training and testing scheme. Extensive experiments show the efficacy of our framework.
Incorporating GNSS Information with LIDAR-Inertial Odometry for Accurate Land-Vehicle Localization
Mar 29, 2025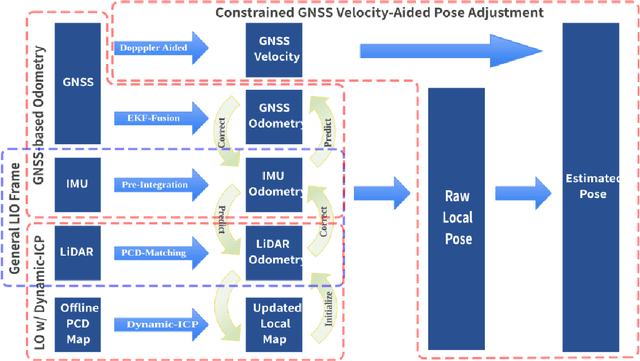
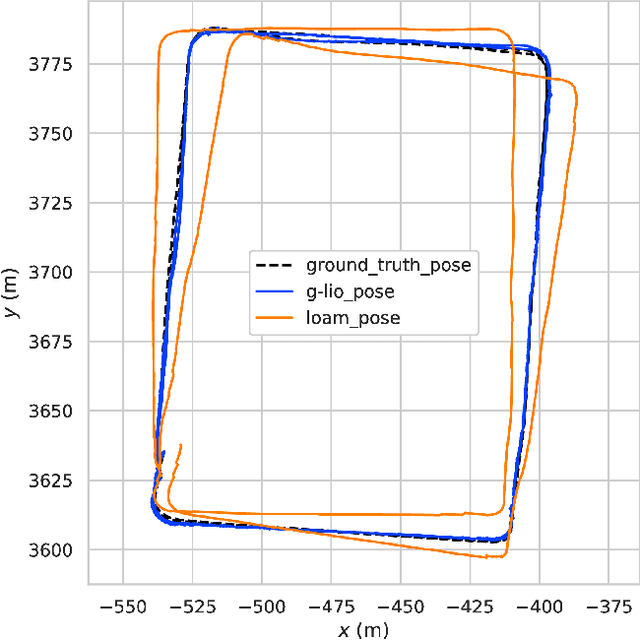
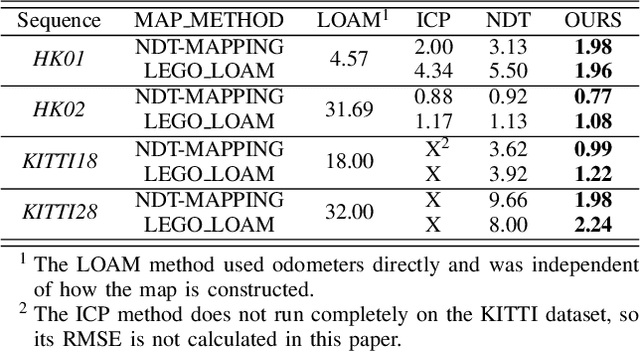
Currently, visual odometry and LIDAR odometry are performing well in pose estimation in some typical environments, but they still cannot recover the localization state at high speed or reduce accumulated drifts. In order to solve these problems, we propose a novel LIDAR-based localization framework, which achieves high accuracy and provides robust localization in 3D pointcloud maps with information of multi-sensors. The system integrates global information with LIDAR-based odometry to optimize the localization state. To improve robustness and enable fast resumption of localization, this paper uses offline pointcloud maps for prior knowledge and presents a novel registration method to speed up the convergence rate. The algorithm is tested on various maps of different data sets and has higher robustness and accuracy than other localization algorithms.
OverlapMamba: Novel Shift State Space Model for LiDAR-based Place Recognition
May 13, 2024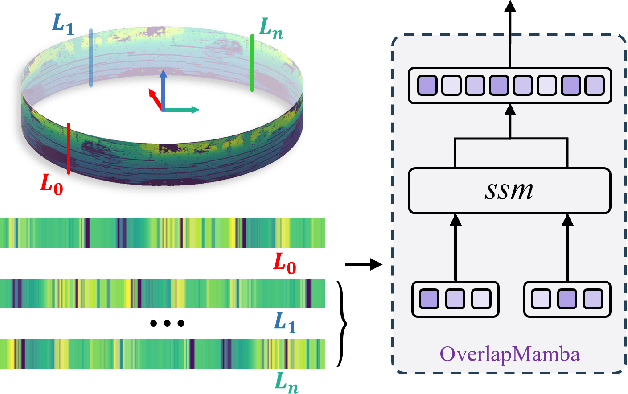
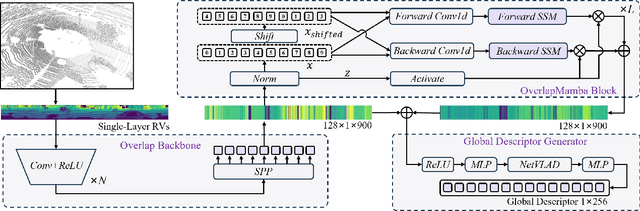
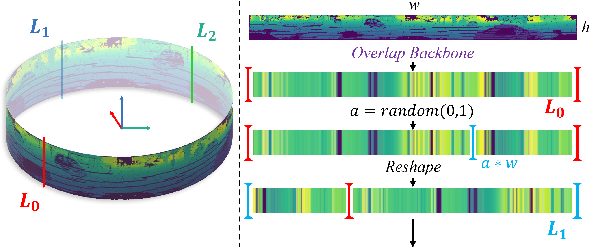
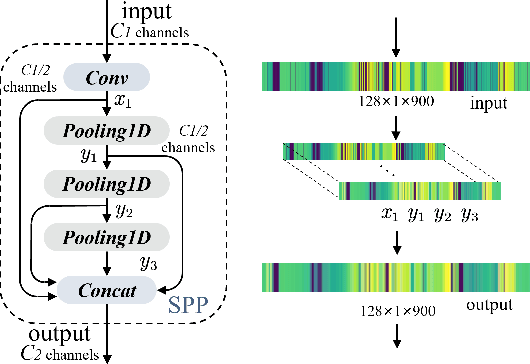
Place recognition is the foundation for enabling autonomous systems to achieve independent decision-making and safe operations. It is also crucial in tasks such as loop closure detection and global localization within SLAM. Previous methods utilize mundane point cloud representations as input and deep learning-based LiDAR-based Place Recognition (LPR) approaches employing different point cloud image inputs with convolutional neural networks (CNNs) or transformer architectures. However, the recently proposed Mamba deep learning model, combined with state space models (SSMs), holds great potential for long sequence modeling. Therefore, we developed OverlapMamba, a novel network for place recognition, which represents input range views (RVs) as sequences. In a novel way, we employ a stochastic reconstruction approach to build shift state space models, compressing the visual representation. Evaluated on three different public datasets, our method effectively detects loop closures, showing robustness even when traversing previously visited locations from different directions. Relying on raw range view inputs, it outperforms typical LiDAR and multi-view combination methods in time complexity and speed, indicating strong place recognition capabilities and real-time efficiency.