 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on Dynamic Topological Graph
Aug 11, 2024



Efficient data transmission and reasonable task allocation are important to improve multi-robot exploration efficiency. However, most communication data types typically contain redundant information and thus require massive communication volume. Moreover, exploration-oriented task allocation is far from trivial and becomes even more challenging for resource-limited unmanned aerial vehicles (UAVs). In this paper, we propose a fast and communication-efficient multi-UAV exploration method for exploring large environments. We first design a multi-robot dynamic topological graph (MR-DTG) consisting of nodes representing the explored and exploring regions and edges connecting nodes. Supported by MR-DTG, our method achieves efficient communication by only transferring the necessary information required by exploration planning. To further improve the exploration efficiency, a hierarchical multi-UAV exploration method is devised using MR-DTG. Specifically, the \emph{graph Voronoi partition} is used to allocate MR-DTG's nodes to the closest UAVs, considering the actual motion cost, thus achieving reasonable task allocation. To our knowledge, this is the first work to address multi-UAV exploration using \emph{graph Voronoi partition}. The proposed method is compared with a state-of-the-art method in simulations. The results show that the proposed method is able to reduce the exploration time and communication volume by up to 38.3\% and 95.5\%, respectively. Finally, the effectiveness of our method is validated in the real-world experiment with 6 UAVs. We will release the source code to benefit the community.
MRPB 1.0: A Unified Benchmark for the Evaluation of Mobile Robot Local Planning Approaches
Nov 01, 2020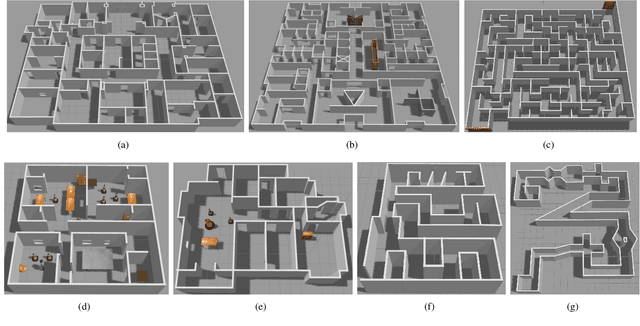
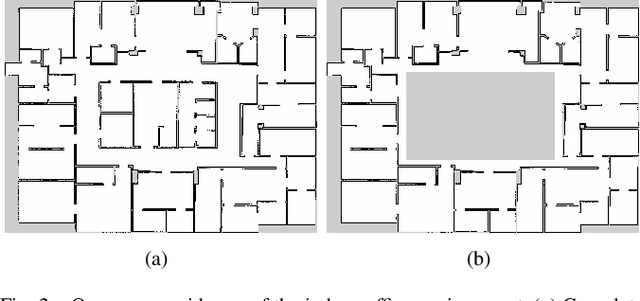


Local planning is one of the key technologies for mobile robots to achieve full autonomy and has been widely investigated. To evaluate mobile robot local planning approaches in a unified and comprehensive way, a mobile robot local planning benchmark called MRPB 1.0 is newly proposed in this paper. The benchmark facilitates both motion planning researchers who want to compare the performance of a new local planner relative to many other state-of-the-art approaches as well as end users in the mobile robotics industry who want to select a local planner that performs best on some problems of interest. We elaborately design various simulation scenarios to challenge the applicability of local planners, including large-scale, partially unknown, and dynamic complex environments. Furthermore, three types of principled evaluation metrics are carefully designed to quantitatively evaluate the performance of local planners, wherein the safety, efficiency, and smoothness of motions are comprehensively considered. We present the application of the proposed benchmark in two popular open-source local planners to show the practicality of the benchmark. In addition, some insights and guidelines about the design and selection of local planners are also provided. The benchmark website contains all data of the designed simulation scenarios, detailed descriptions of these scenarios, and example code.