 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Flight Control Systems from Human Demonstrations and Real-Time Uncertainty-Informed Interventions
May 01, 2023



This paper describes a methodology for learning flight control systems from human demonstrations and interventions while considering the estimated uncertainty in the learned models. The proposed approach uses human demonstrations to train an initial model via imitation learning and then iteratively, improve its performance by using real-time human interventions. The aim of the interventions is to correct undesired behaviors and adapt the model to changes in the task dynamics. The learned model uncertainty is estimated in real-time via Monte Carlo Dropout and the human supervisor is cued for intervention via an audiovisual signal when this uncertainty exceeds a predefined threshold. This proposed approach is validated in an autonomous quadrotor landing task on both fixed and moving platforms. It is shown that with this algorithm, a human can rapidly teach a flight task to an unmanned aerial vehicle via demonstrating expert trajectories and then adapt the learned model by intervening when the learned controller performs any undesired maneuver, the task changes, and/or the model uncertainty exceeds a threshold
Incremental cycle bases for cycle-based pose graph optimization
Sep 15, 2022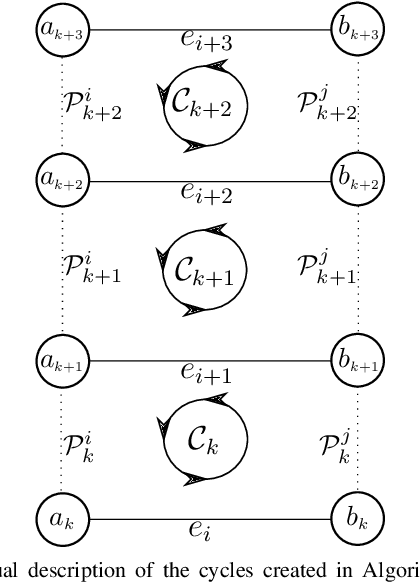
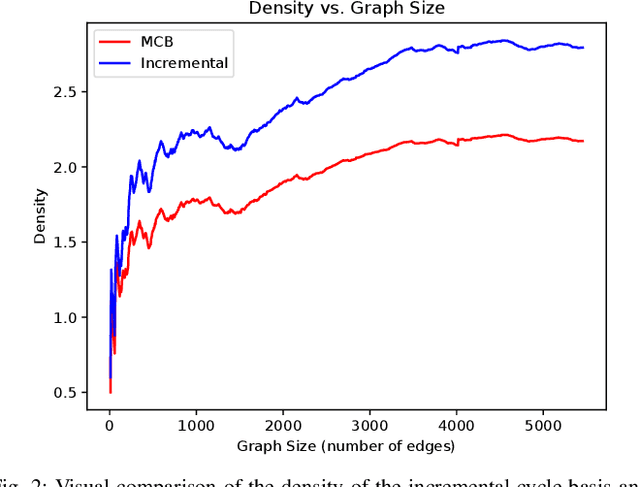
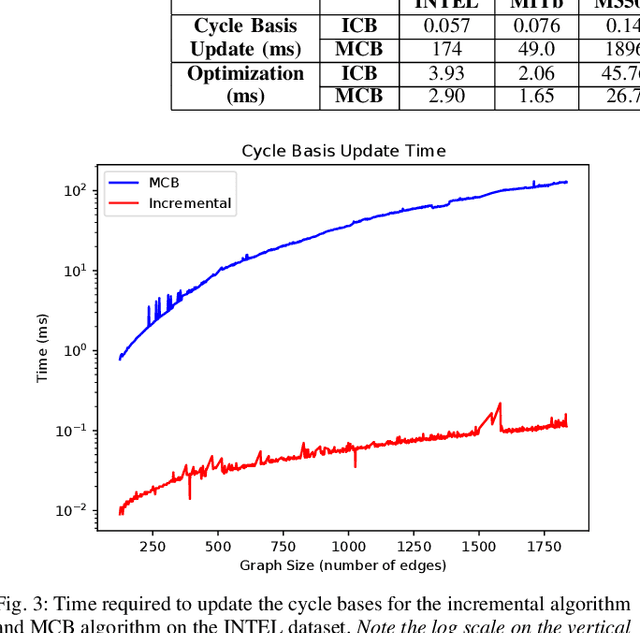
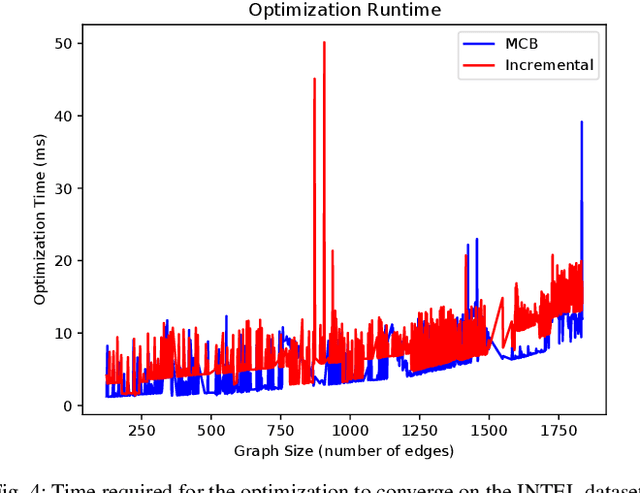
Pose graph optimization is a special case of the simultaneous localization and mapping problem where the only variables to be estimated are pose variables and the only measurements are inter-pose constraints. The vast majority of PGO techniques are vertex based (variables are robot poses), but recent work has parameterized the pose graph optimization problem in a relative fashion (variables are the transformations between poses) that utilizes a minimum cycle basis to maximize the sparsity of the problem. We explore the construction of a cycle basis in an incremental manner while maximizing the sparsity. We validate an algorithm that constructs a sparse cycle basis incrementally and compare its performance with a minimum cycle basis. Additionally, we present an algorithm to approximate the minimum cycle basis of two graphs that are sparsely connected as is common in multi-agent scenarios. Lastly, the relative parameterization of pose graph optimization has been limited to using rigid body transforms on SE(2) or SE(3) as the constraints between poses. We introduce a methodology to allow for the use of lower-degree-of-freedom measurements in the relative pose graph optimization problem. We provide extensive validation of our algorithms on standard benchmarks, simulated datasets, and custom hardware.
Going Beyond RF: How AI-enabled Multimodal Beamforming will Shape the NextG Standard
Mar 30, 2022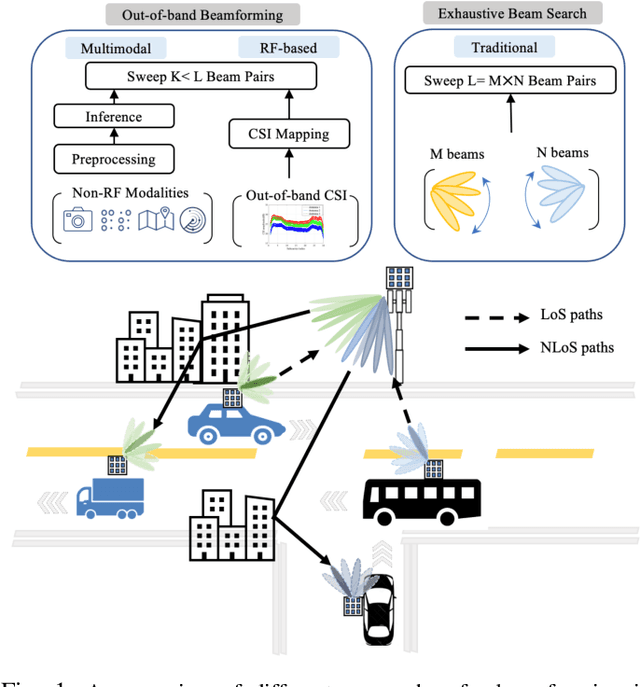
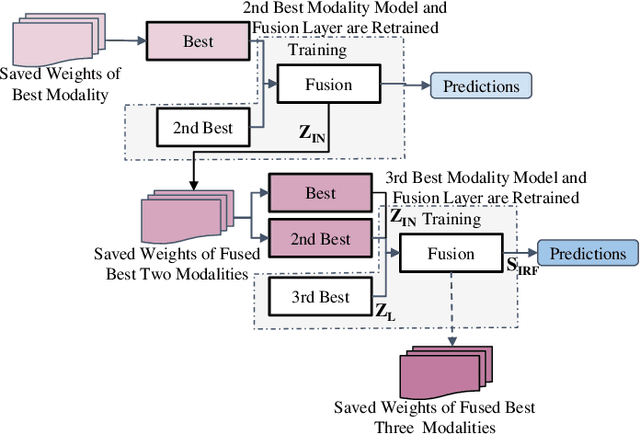


Incorporating artificial intelligence and machine learning (AI/ML) methods within the 5G wireless standard promises autonomous network behavior and ultra-low-latency reconfiguration. However, the effort so far has purely focused on learning from radio frequency (RF) signals. Future standards and next-generation (nextG) networks beyond 5G will have two significant evolutions over the state-of-the-art 5G implementations: (i) massive number of antenna elements, scaling up to hundreds-to-thousands in number, and (ii) inclusion of AI/ML in the critical path of the network reconfiguration process that can access sensor feeds from a variety of RF and non-RF sources. While the former allows unprecedented flexibility in 'beamforming', where signals combine constructively at a target receiver, the latter enables the network with enhanced situation awareness not captured by a single and isolated data modality. This survey presents a thorough analysis of the different approaches used for beamforming today, focusing on mmWave bands, and then proceeds to make a compelling case for considering non-RF sensor data from multiple modalities, such as LiDAR, Radar, GPS for increasing beamforming directional accuracy and reducing processing time. This so called idea of multimodal beamforming will require deep learning based fusion techniques, which will serve to augment the current RF-only and classical signal processing methods that do not scale well for massive antenna arrays. The survey describes relevant deep learning architectures for multimodal beamforming, identifies computational challenges and the role of edge computing in this process, dataset generation tools, and finally, lists open challenges that the community should tackle to realize this transformative vision of the future of beamforming.