 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSMTrack: End-to-End Trained Spiking Neural Networks for Multi-Object Tracking in RGB Videos
Aug 20, 2025Brain-inspired Spiking Neural Networks (SNNs) exhibit significant potential for low-power computation, yet their application in visual tasks remains largely confined to image classification, object detection, and event-based tracking. In contrast, real-world vision systems still widely use conventional RGB video streams, where the potential of directly-trained SNNs for complex temporal tasks such as multi-object tracking (MOT) remains underexplored. To address this challenge, we propose SMTrack-the first directly trained deep SNN framework for end-to-end multi-object tracking on standard RGB videos. SMTrack introduces an adaptive and scale-aware Normalized Wasserstein Distance loss (Asa-NWDLoss) to improve detection and localization performance under varying object scales and densities. Specifically, the method computes the average object size within each training batch and dynamically adjusts the normalization factor, thereby enhancing sensitivity to small objects. For the association stage, we incorporate the TrackTrack identity module to maintain robust and consistent object trajectories. Extensive evaluations on BEE24, MOT17, MOT20, and DanceTrack show that SMTrack achieves performance on par with leading ANN-based MOT methods, advancing robust and accurate SNN-based tracking in complex scenarios.
Camouflaged_Object_Tracking__A_Benchmark
Aug 25, 2024



Visual tracking has seen remarkable advancements, largely driven by the availability of large-scale training datasets that have enabled the development of highly accurate and robust algorithms. While significant progress has been made in tracking general objects, research on more challenging scenarios, such as tracking camouflaged objects, remains limited. Camouflaged objects, which blend seamlessly with their surroundings or other objects, present unique challenges for detection and tracking in complex environments. This challenge is particularly critical in applications such as military, security, agriculture, and marine monitoring, where precise tracking of camouflaged objects is essential. To address this gap, we introduce the Camouflaged Object Tracking Dataset (COTD), a specialized benchmark designed specifically for evaluating camouflaged object tracking methods. The COTD dataset comprises 200 sequences and approximately 80,000 frames, each annotated with detailed bounding boxes. Our evaluation of 20 existing tracking algorithms reveals significant deficiencies in their performance with camouflaged objects. To address these issues, we propose a novel tracking framework, HiPTrack-MLS, which demonstrates promising results in improving tracking performance for camouflaged objects. COTD and code are avialable at https://github.com/openat25/HIPTrack-MLS.
Low-Light Object Tracking: A Benchmark
Aug 21, 2024In recent years, the field of visual tracking has made significant progress with the application of large-scale training datasets. These datasets have supported the development of sophisticated algorithms, enhancing the accuracy and stability of visual object tracking. However, most research has primarily focused on favorable illumination circumstances, neglecting the challenges of tracking in low-ligh environments. In low-light scenes, lighting may change dramatically, targets may lack distinct texture features, and in some scenarios, targets may not be directly observable. These factors can lead to a severe decline in tracking performance. To address this issue, we introduce LLOT, a benchmark specifically designed for Low-Light Object Tracking. LLOT comprises 269 challenging sequences with a total of over 132K frames, each carefully annotated with bounding boxes. This specially designed dataset aims to promote innovation and advancement in object tracking techniques for low-light conditions, addressing challenges not adequately covered by existing benchmarks. To assess the performance of existing methods on LLOT, we conducted extensive tests on 39 state-of-the-art tracking algorithms. The results highlight a considerable gap in low-light tracking performance. In response, we propose H-DCPT, a novel tracker that incorporates historical and darkness clue prompts to set a stronger baseline. H-DCPT outperformed all 39 evaluated methods in our experiments, demonstrating significant improvements. We hope that our benchmark and H-DCPT will stimulate the development of novel and accurate methods for tracking objects in low-light conditions. The LLOT and code are available at https://github.com/OpenCodeGithub/H-DCPT.
Tracking Reflected Objects: A Benchmark
Jul 07, 2024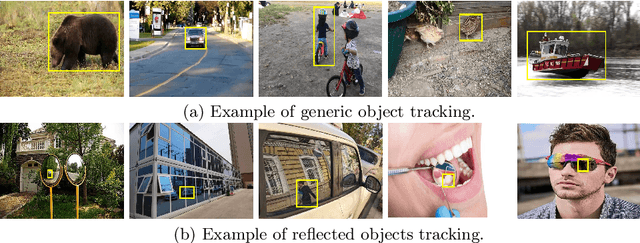

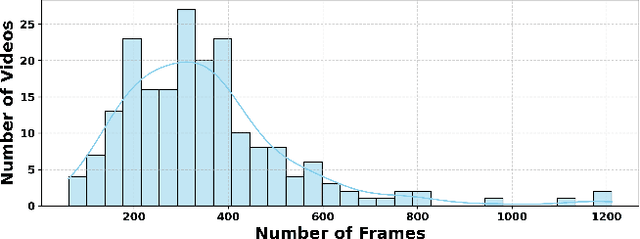
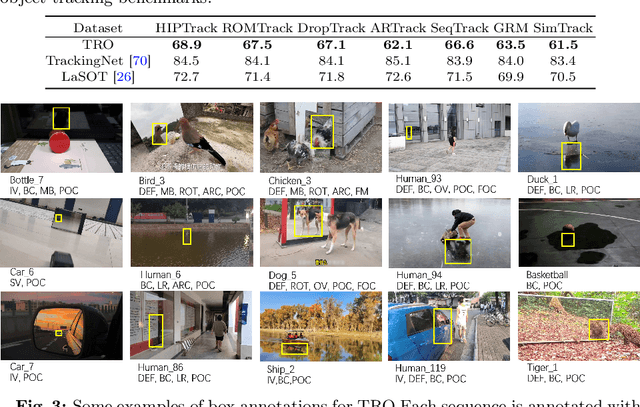
Visual tracking has advanced significantly in recent years, mainly due to the availability of large-scale training datasets. These datasets have enabled the development of numerous algorithms that can track objects with high accuracy and robustness.However, the majority of current research has been directed towards tracking generic objects, with less emphasis on more specialized and challenging scenarios. One such challenging scenario involves tracking reflected objects. Reflections can significantly distort the appearance of objects, creating ambiguous visual cues that complicate the tracking process. This issue is particularly pertinent in applications such as autonomous driving, security, smart homes, and industrial production, where accurately tracking objects reflected in surfaces like mirrors or glass is crucial. To address this gap, we introduce TRO, a benchmark specifically for Tracking Reflected Objects. TRO includes 200 sequences with around 70,000 frames, each carefully annotated with bounding boxes. This dataset aims to encourage the development of new, accurate methods for tracking reflected objects, which present unique challenges not sufficiently covered by existing benchmarks. We evaluated 20 state-of-the-art trackers and found that they struggle with the complexities of reflections. To provide a stronger baseline, we propose a new tracker, HiP-HaTrack, which uses hierarchical features to improve performance, significantly outperforming existing algorithms. We believe our benchmark, evaluation, and HiP-HaTrack will inspire further research and applications in tracking reflected objects. The TRO and code are available at https://github.com/OpenCodeGithub/HIP-HaTrack.