 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKimi K2.5: Visual Agentic Intelligence
Feb 02, 2026We introduce Kimi K2.5, an open-source multimodal agentic model designed to advance general agentic intelligence. K2.5 emphasizes the joint optimization of text and vision so that two modalities enhance each other. This includes a series of techniques such as joint text-vision pre-training, zero-vision SFT, and joint text-vision reinforcement learning. Building on this multimodal foundation, K2.5 introduces Agent Swarm, a self-directed parallel agent orchestration framework that dynamically decomposes complex tasks into heterogeneous sub-problems and executes them concurrently. Extensive evaluations show that Kimi K2.5 achieves state-of-the-art results across various domains including coding, vision, reasoning, and agentic tasks. Agent Swarm also reduces latency by up to $4.5\times$ over single-agent baselines. We release the post-trained Kimi K2.5 model checkpoint to facilitate future research and real-world applications of agentic intelligence.
Body Discovery of Embodied AI
Mar 25, 2025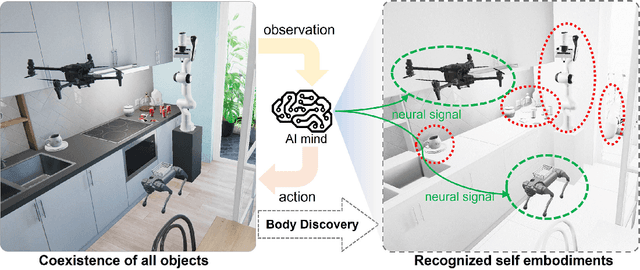
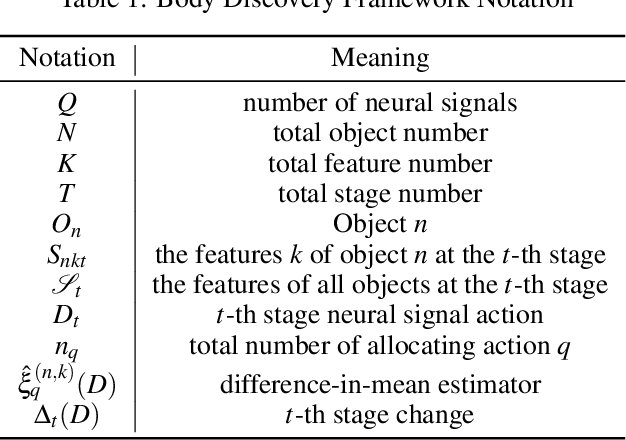
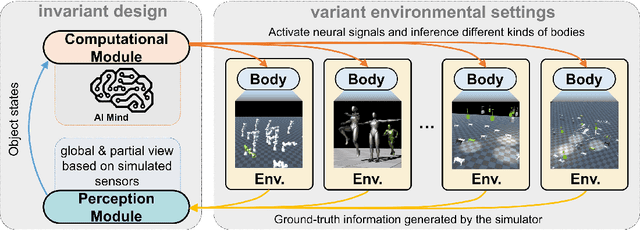
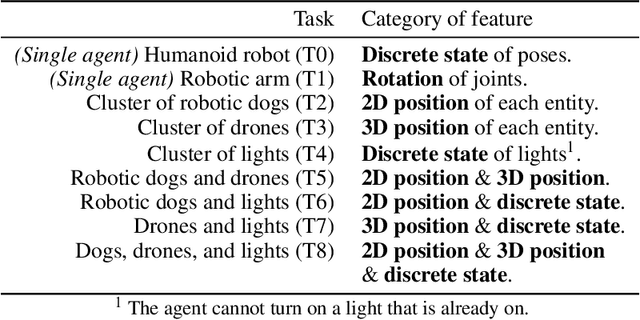
In the pursuit of realizing artificial general intelligence (AGI), the importance of embodied artificial intelligence (AI) becomes increasingly apparent. Following this trend, research integrating robots with AGI has become prominent. As various kinds of embodiments have been designed, adaptability to diverse embodiments will become important to AGI. We introduce a new challenge, termed "Body Discovery of Embodied AI", focusing on tasks of recognizing embodiments and summarizing neural signal functionality. The challenge encompasses the precise definition of an AI body and the intricate task of identifying embodiments in dynamic environments, where conventional approaches often prove inadequate. To address these challenges, we apply causal inference method and evaluate it by developing a simulator tailored for testing algorithms with virtual environments. Finally, we validate the efficacy of our algorithms through empirical testing, demonstrating their robust performance in various scenarios based on virtual environments.
Flatness-Aware Minimization for Domain Generalization
Jul 20, 2023
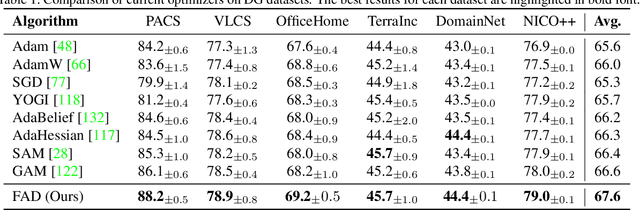
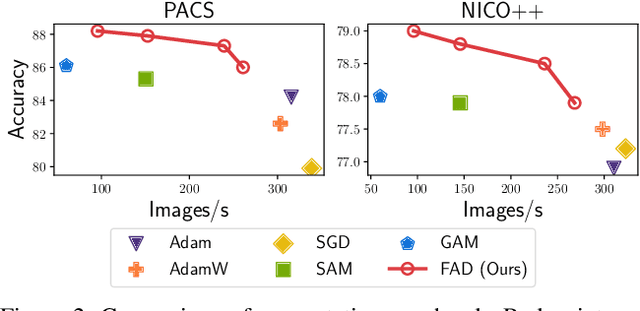

Domain generalization (DG) seeks to learn robust models that generalize well under unknown distribution shifts. As a critical aspect of DG, optimizer selection has not been explored in depth. Currently, most DG methods follow the widely used benchmark, DomainBed, and utilize Adam as the default optimizer for all datasets. However, we reveal that Adam is not necessarily the optimal choice for the majority of current DG methods and datasets. Based on the perspective of loss landscape flatness, we propose a novel approach, Flatness-Aware Minimization for Domain Generalization (FAD), which can efficiently optimize both zeroth-order and first-order flatness simultaneously for DG. We provide theoretical analyses of the FAD's out-of-distribution (OOD) generalization error and convergence. Our experimental results demonstrate the superiority of FAD on various DG datasets. Additionally, we confirm that FAD is capable of discovering flatter optima in comparison to other zeroth-order and first-order flatness-aware optimization methods.
* Accepted by ICCV2023