 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Scale Asset Distribution Model for Dynamic Environments
Jul 25, 2022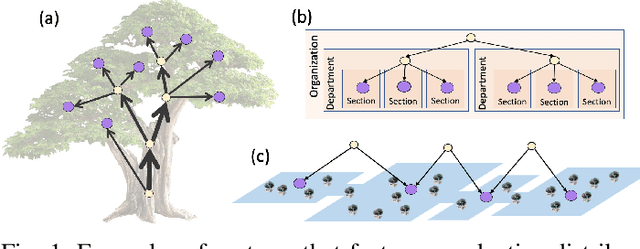

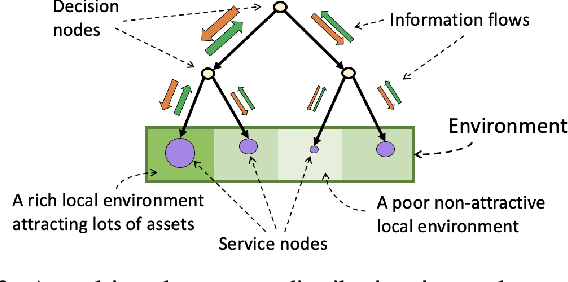

In many self-organising systems the ability to extract necessary resources from the external environment is essential to the system's growth and survival. Examples include the extraction of sunlight and nutrients in organic plants, of monetary income in business organisations and of mobile robots in swarm intelligence actions. When operating within competitive, ever-changing environments, such systems must distribute their internal assets wisely so as to improve and adapt their ability to extract available resources. As the system size increases, the asset-distribution process often gets organised around a multi-scale control topology. This topology may be static (fixed) or dynamic (enabling growth and structural adaptation) depending on the system's internal constraints and adaptive mechanisms. In this paper, we expand on a plant-inspired asset-distribution model and introduce a more general multi-scale model applicable across a wider range of natural and artificial system domains. We study the impact that the topology of the multi-scale control process has upon the system's ability to self-adapt asset distribution when resource availability changes within the environment. Results show how different topological characteristics and different competition levels between system branches impact overall system profitability, adaptation delays and disturbances when environmental changes occur. These findings provide a basis for system designers to select the most suitable topology and configuration for their particular application and execution environment.
A Robot to Shape your Natural Plant: The Machine Learning Approach to Model and Control Bio-Hybrid Systems
Apr 19, 2018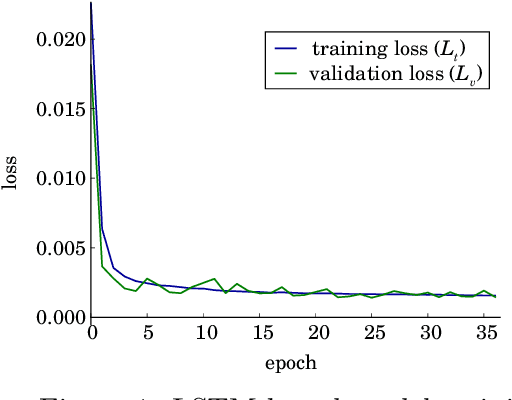
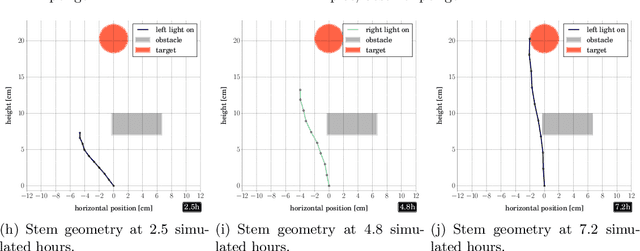
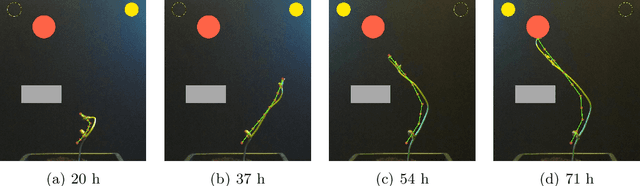
Bio-hybrid systems---close couplings of natural organisms with technology---are high potential and still underexplored. In existing work, robots have mostly influenced group behaviors of animals. We explore the possibilities of mixing robots with natural plants, merging useful attributes. Significant synergies arise by combining the plants' ability to efficiently produce shaped material and the robots' ability to extend sensing and decision-making behaviors. However, programming robots to control plant motion and shape requires good knowledge of complex plant behaviors. Therefore, we use machine learning to create a holistic plant model and evolve robot controllers. As a benchmark task we choose obstacle avoidance. We use computer vision to construct a model of plant stem stiffening and motion dynamics by training an LSTM network. The LSTM network acts as a forward model predicting change in the plant, driving the evolution of neural network robot controllers. The evolved controllers augment the plants' natural light-finding and tissue-stiffening behaviors to avoid obstacles and grow desired shapes. We successfully verify the robot controllers and bio-hybrid behavior in reality, with a physical setup and actual plants.
Artificial Plants - Vascular Morphogenesis Controller-guided growth of braided structures
Apr 17, 2018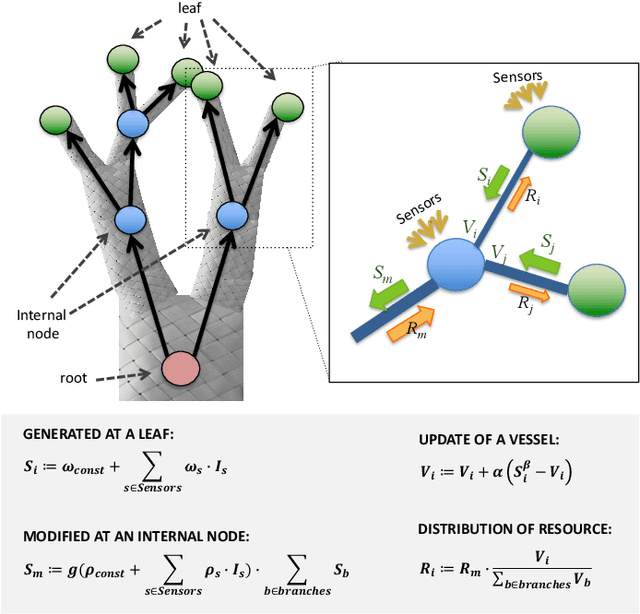

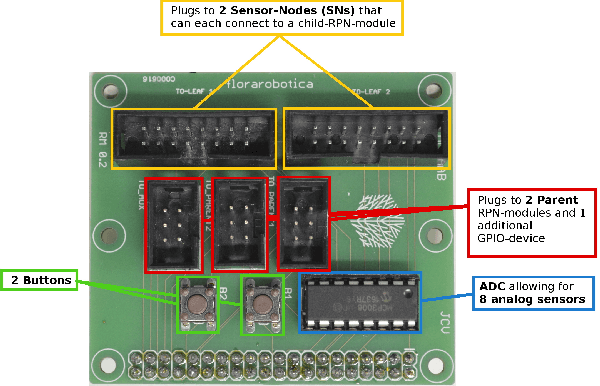
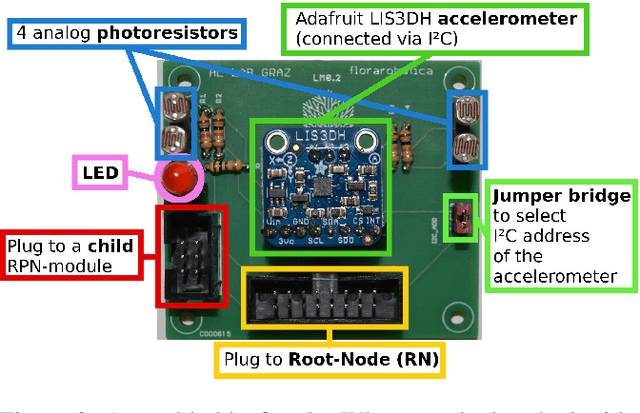
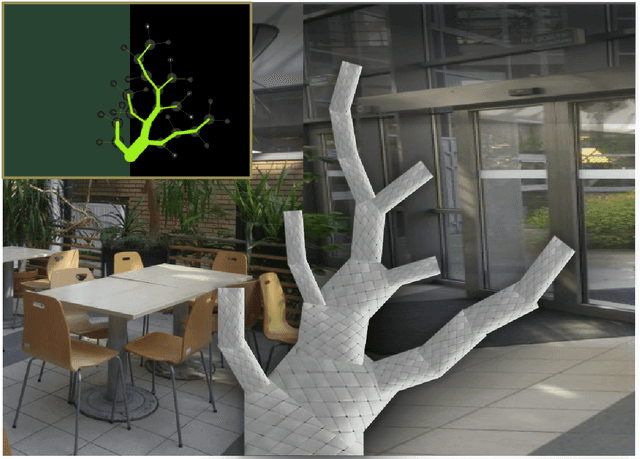
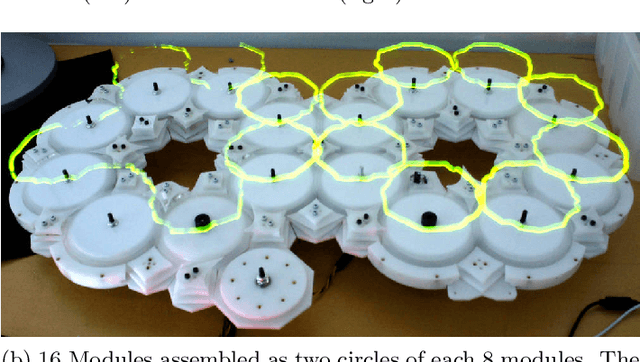
Natural plants are exemplars of adaptation through self-organisation and collective decision making. As such, they provide a rich source of inspiration for adaptive mechanisms in artificial systems. Plant growth - a structure development mechanism of continuous material accumulation that expresses encoded morphological features through environmental interactions - has been extensively explored in-silico. However, ex-silico scalable morphological adaptation through material accumulation remains an open challenge. In this paper, we present a novel type of biologically inspired modularity, and an approach to artificial growth that combines the benefits of material continuity through braiding with a distributed and decentralised plant-inspired Vascular Morphogenesis Controller (VMC). The controller runs on nodes that are capable of sensing and communicating with their neighbours. The nodes are embedded within the braided structure, which can be morphologically adapted based on collective decision making between nodes. Human agents realise the material adaptation by physically adding to the braided structure according to the suggestion of the embedded controller. This work offers a novel, tangible and accessible approach to embedding mechanisms of artificial growth and morphological adaptation within physically embodied systems, offering radically new functionalities, innovation potentials and approaches to continuous autonomous or steered design that could find application within fields contributing to the built environment, such as Architecture.
Flora robotica -- An Architectural System Combining Living Natural Plants and Distributed Robots
Sep 13, 2017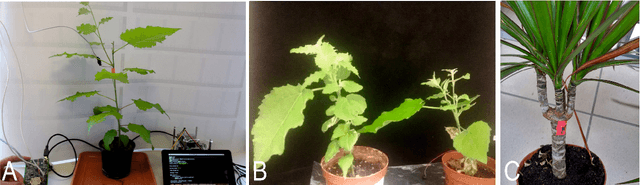

Key to our project flora robotica is the idea of creating a bio-hybrid system of tightly coupled natural plants and distributed robots to grow architectural artifacts and spaces. Our motivation with this ground research project is to lay a principled foundation towards the design and implementation of living architectural systems that provide functionalities beyond those of orthodox building practice, such as self-repair, material accumulation and self-organization. Plants and robots work together to create a living organism that is inhabited by human beings. User-defined design objectives help to steer the directional growth of the plants, but also the system's interactions with its inhabitants determine locations where growth is prohibited or desired (e.g., partitions, windows, occupiable space). We report our plant species selection process and aspects of living architecture. A leitmotif of our project is the rich concept of braiding: braids are produced by robots from continuous material and serve as both scaffolds and initial architectural artifacts before plants take over and grow the desired architecture. We use light and hormones as attraction stimuli and far-red light as repelling stimulus to influence the plants. Applied sensors range from simple proximity sensing to detect the presence of plants to sophisticated sensing technology, such as electrophysiology and measurements of sap flow. We conclude by discussing our anticipated final demonstrator that integrates key features of flora robotica, such as the continuous growth process of architectural artifacts and self-repair of living architecture.
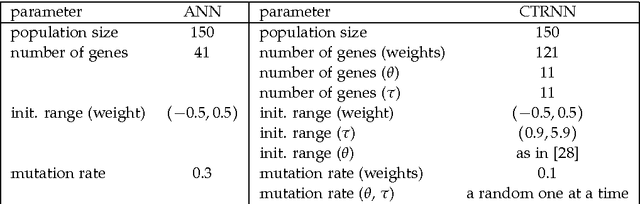
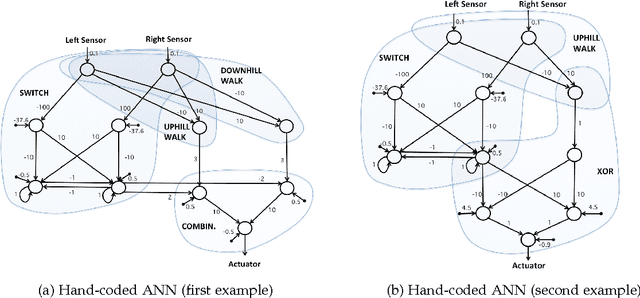
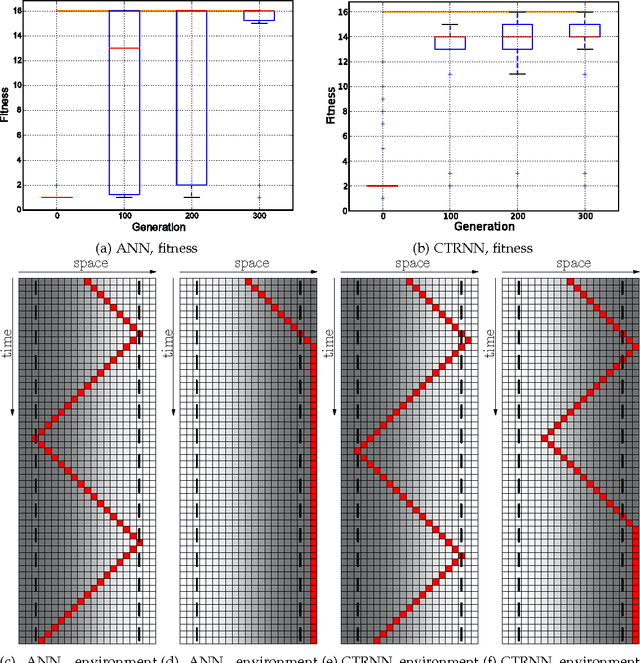
Sooner than Expected: Hitting the Wall of Complexity in Evolution
Sep 25, 2016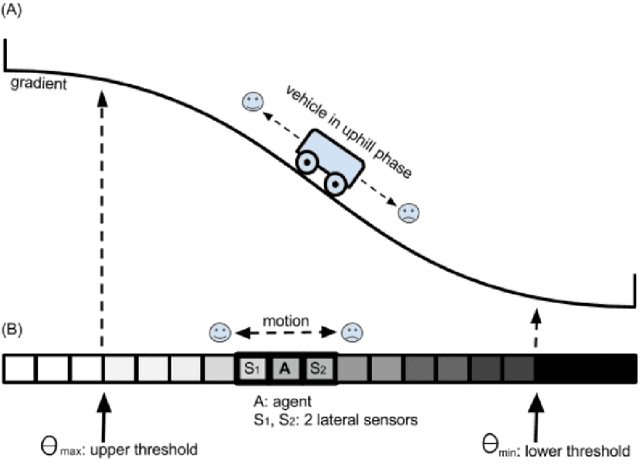
In evolutionary robotics an encoding of the control software, which maps sensor data (input) to motor control values (output), is shaped by stochastic optimization methods to complete a predefined task. This approach is assumed to be beneficial compared to standard methods of controller design in those cases where no a-priori model is available that could help to optimize performance. Also for robots that have to operate in unpredictable environments, an evolutionary robotics approach is favorable. We demonstrate here that such a model-free approach is not a free lunch, as already simple tasks can represent unsolvable barriers for fully open-ended uninformed evolutionary computation techniques. We propose here the 'Wankelmut' task as an objective for an evolutionary approach that starts from scratch without pre-shaped controller software or any other informed approach that would force the behavior to be evolved in a desired way. Our focal claim is that 'Wankelmut' represents the simplest set of problems that makes plain-vanilla evolutionary computation fail. We demonstrate this by a series of simple standard evolutionary approaches using different fitness functions and standard artificial neural networks as well as continuous-time recurrent neural networks. All our tested approaches failed. We claim that any other evolutionary approach will also fail that does per-se not favor or enforce modularity and does not freeze or protect already evolved functionalities. Thus we propose a hard-to-pass benchmark and make a strong statement for self-complexifying and generative approaches in evolutionary computation. We anticipate that defining such a 'simplest task to fail' is a valuable benchmark for promoting future development in the field of artificial intelligence, evolutionary robotics and artificial life.