 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSooner than Expected: Hitting the Wall of Complexity in Evolution
Paper and Code
Sep 25, 2016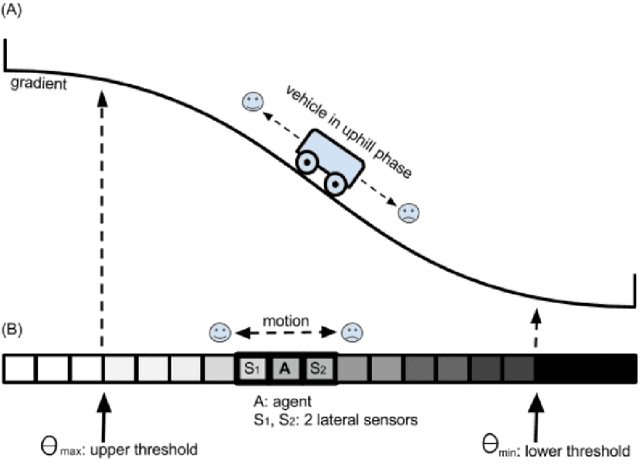
In evolutionary robotics an encoding of the control software, which maps sensor data (input) to motor control values (output), is shaped by stochastic optimization methods to complete a predefined task. This approach is assumed to be beneficial compared to standard methods of controller design in those cases where no a-priori model is available that could help to optimize performance. Also for robots that have to operate in unpredictable environments, an evolutionary robotics approach is favorable. We demonstrate here that such a model-free approach is not a free lunch, as already simple tasks can represent unsolvable barriers for fully open-ended uninformed evolutionary computation techniques. We propose here the 'Wankelmut' task as an objective for an evolutionary approach that starts from scratch without pre-shaped controller software or any other informed approach that would force the behavior to be evolved in a desired way. Our focal claim is that 'Wankelmut' represents the simplest set of problems that makes plain-vanilla evolutionary computation fail. We demonstrate this by a series of simple standard evolutionary approaches using different fitness functions and standard artificial neural networks as well as continuous-time recurrent neural networks. All our tested approaches failed. We claim that any other evolutionary approach will also fail that does per-se not favor or enforce modularity and does not freeze or protect already evolved functionalities. Thus we propose a hard-to-pass benchmark and make a strong statement for self-complexifying and generative approaches in evolutionary computation. We anticipate that defining such a 'simplest task to fail' is a valuable benchmark for promoting future development in the field of artificial intelligence, evolutionary robotics and artificial life.