 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA More General Theory of Diagnosis from First Principles
Sep 28, 2023



Model-based diagnosis has been an active research topic in different communities including artificial intelligence, formal methods, and control. This has led to a set of disparate approaches addressing different classes of systems and seeking different forms of diagnoses. In this paper, we resolve such disparities by generalising Reiter's theory to be agnostic to the types of systems and diagnoses considered. This more general theory of diagnosis from first principles defines the minimal diagnosis as the set of preferred diagnosis candidates in a search space of hypotheses. Computing the minimal diagnosis is achieved by exploring the space of diagnosis hypotheses, testing sets of hypotheses for consistency with the system's model and the observation, and generating conflicts that rule out successors and other portions of the search space. Under relatively mild assumptions, our algorithms correctly compute the set of preferred diagnosis candidates. The main difficulty here is that the search space is no longer a powerset as in Reiter's theory, and that, as consequence, many of the implicit properties (such as finiteness of the search space) no longer hold. The notion of conflict also needs to be generalised and we present such a more general notion. We present two implementations of these algorithms, using test solvers based on satisfiability and heuristic search, respectively, which we evaluate on instances from two real world discrete event problems. Despite the greater generality of our theory, these implementations surpass the special purpose algorithms designed for discrete event systems, and enable solving instances that were out of reach of existing diagnosis approaches.
Automated Action Model Acquisition from Narrative Texts
Jul 17, 2023Action models, which take the form of precondition/effect axioms, facilitate causal and motivational connections between actions for AI agents. Action model acquisition has been identified as a bottleneck in the application of planning technology, especially within narrative planning. Acquiring action models from narrative texts in an automated way is essential, but challenging because of the inherent complexities of such texts. We present NaRuto, a system that extracts structured events from narrative text and subsequently generates planning-language-style action models based on predictions of commonsense event relations, as well as textual contradictions and similarities, in an unsupervised manner. Experimental results in classical narrative planning domains show that NaRuto can generate action models of significantly better quality than existing fully automated methods, and even on par with those of semi-automated methods.
EDeR: A Dataset for Exploring Dependency Relations Between Events
Apr 04, 2023



Relation extraction is a central task in natural language processing (NLP) and information retrieval (IR) research. We argue that an important type of relation not explored in NLP or IR research to date is that of an event being an argument - required or optional - of another event. We introduce the human-annotated Event Dependency Relation dataset (EDeR) which provides this dependency relation. The annotation is done on a sample of documents from the OntoNotes dataset, which has the added benefit that it integrates with existing, orthogonal, annotations of this dataset. We investigate baseline approaches for predicting the event dependency relation, the best of which achieves an accuracy of 82.61 for binary argument/non-argument classification. We show that recognizing this relation leads to more accurate event extraction (semantic role labelling) and can improve downstream tasks that depend on this, such as co-reference resolution. Furthermore, we demonstrate that predicting the three-way classification into the required argument, optional argument or non-argument is a more challenging task.
Numerical Integration and Dynamic Discretization in Heuristic Search Planning over Hybrid Domains
Mar 13, 2017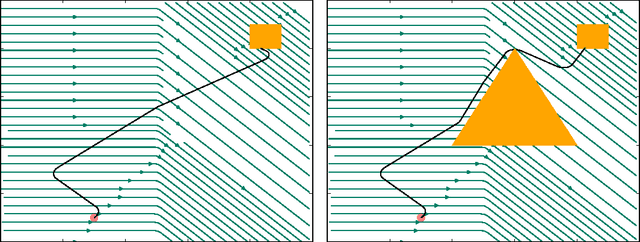
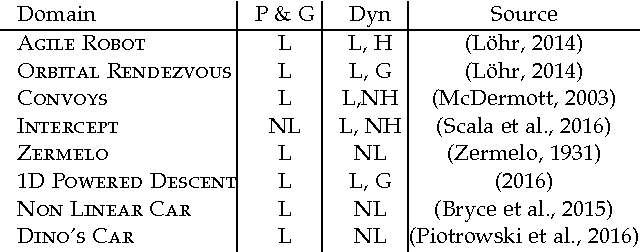
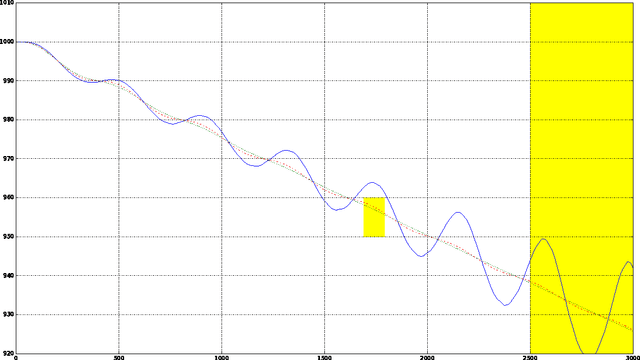
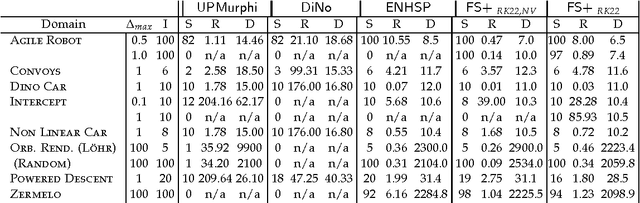
In this paper we look into the problem of planning over hybrid domains, where change can be both discrete and instantaneous, or continuous over time. In addition, it is required that each state on the trajectory induced by the execution of plans complies with a given set of global constraints. We approach the computation of plans for such domains as the problem of searching over a deterministic state model. In this model, some of the successor states are obtained by solving numerically the so-called initial value problem over a set of ordinary differential equations (ODE) given by the current plan prefix. These equations hold over time intervals whose duration is determined dynamically, according to whether zero crossing events take place for a set of invariant conditions. The resulting planner, FS+, incorporates these features together with effective heuristic guidance. FS+ does not impose any of the syntactic restrictions on process effects often found on the existing literature on Hybrid Planning. A key concept of our approach is that a clear separation is struck between planning and simulation time steps. The former is the time allowed to observe the evolution of a given dynamical system before committing to a future course of action, whilst the later is part of the model of the environment. FS+ is shown to be a robust planner over a diverse set of hybrid domains, taken from the existing literature on hybrid planning and systems.
Narrative Planning: Compilations to Classical Planning
Jan 23, 2014
A model of story generation recently proposed by Riedl and Young casts it as planning, with the additional condition that story characters behave intentionally. This means that characters have perceivable motivation for the actions they take. I show that this condition can be compiled away (in more ways than one) to produce a classical planning problem that can be solved by an off-the-shelf classical planner, more efficiently than by Riedl and Youngs specialised planner.