 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiFuse-Net: RGB and Dual-Pixel Depth Estimation using Window Bi-directional Parallax Attention and Cross-modal Transfer Learning
Jun 17, 2025Depth estimation is crucial for intelligent systems, enabling applications from autonomous navigation to augmented reality. While traditional stereo and active depth sensors have limitations in cost, power, and robustness, dual-pixel (DP) technology, ubiquitous in modern cameras, offers a compelling alternative. This paper introduces DiFuse-Net, a novel modality decoupled network design for disentangled RGB and DP based depth estimation. DiFuse-Net features a window bi-directional parallax attention mechanism (WBiPAM) specifically designed to capture the subtle DP disparity cues unique to smartphone cameras with small aperture. A separate encoder extracts contextual information from the RGB image, and these features are fused to enhance depth prediction. We also propose a Cross-modal Transfer Learning (CmTL) mechanism to utilize large-scale RGB-D datasets in the literature to cope with the limitations of obtaining large-scale RGB-DP-D dataset. Our evaluation and comparison of the proposed method demonstrates its superiority over the DP and stereo-based baseline methods. Additionally, we contribute a new, high-quality, real-world RGB-DP-D training dataset, named Dual-Camera Dual-Pixel (DCDP) dataset, created using our novel symmetric stereo camera hardware setup, stereo calibration and rectification protocol, and AI stereo disparity estimation method.
Joint Flow And Feature Refinement Using Attention For Video Restoration
May 22, 2025Recent advancements in video restoration have focused on recovering high-quality video frames from low-quality inputs. Compared with static images, the performance of video restoration significantly depends on efficient exploitation of temporal correlations among successive video frames. The numerous techniques make use of temporal information via flow-based strategies or recurrent architectures. However, these methods often encounter difficulties in preserving temporal consistency as they utilize degraded input video frames. To resolve this issue, we propose a novel video restoration framework named Joint Flow and Feature Refinement using Attention (JFFRA). The proposed JFFRA is based on key philosophy of iteratively enhancing data through the synergistic collaboration of flow (alignment) and restoration. By leveraging previously enhanced features to refine flow and vice versa, JFFRA enables efficient feature enhancement using temporal information. This interplay between flow and restoration is executed at multiple scales, reducing the dependence on precise flow estimation. Moreover, we incorporate an occlusion-aware temporal loss function to enhance the network's capability in eliminating flickering artifacts. Comprehensive experiments validate the versatility of JFFRA across various restoration tasks such as denoising, deblurring, and super-resolution. Our method demonstrates a remarkable performance improvement of up to 1.62 dB compared to state-of-the-art approaches.
MIPI 2023 Challenge on RGB+ToF Depth Completion: Methods and Results
Apr 27, 2023



Depth completion from RGB images and sparse Time-of-Flight (ToF) measurements is an important problem in computer vision and robotics. While traditional methods for depth completion have relied on stereo vision or structured light techniques, recent advances in deep learning have enabled more accurate and efficient completion of depth maps from RGB images and sparse ToF measurements. To evaluate the performance of different depth completion methods, we organized an RGB+sparse ToF depth completion competition. The competition aimed to encourage research in this area by providing a standardized dataset and evaluation metrics to compare the accuracy of different approaches. In this report, we present the results of the competition and analyze the strengths and weaknesses of the top-performing methods. We also discuss the implications of our findings for future research in RGB+sparse ToF depth completion. We hope that this competition and report will help to advance the state-of-the-art in this important area of research. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2023.
AcED: Accurate and Edge-consistent Monocular Depth Estimation
Jun 16, 2020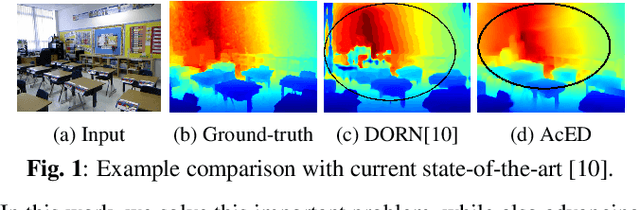
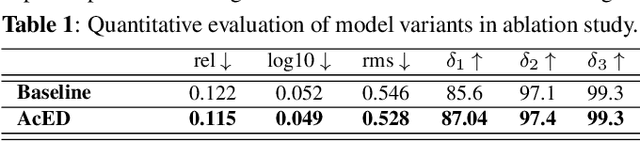

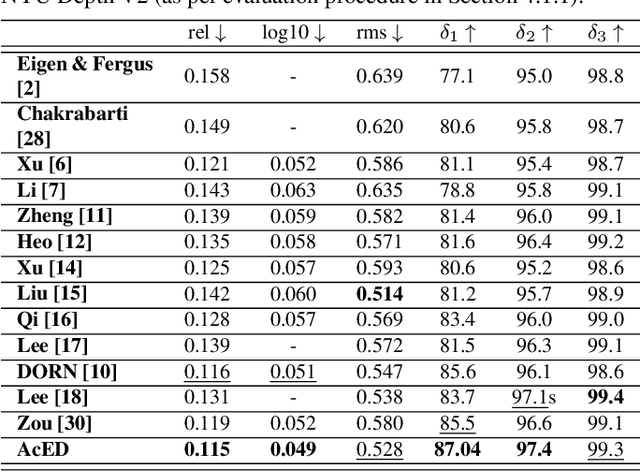
Single image depth estimation is a challenging problem. The current state-of-the-art method formulates the problem as that of ordinal regression. However, the formulation is not fully differentiable and depth maps are not generated in an end-to-end fashion. The method uses a na\"ive threshold strategy to determine per-pixel depth labels, which results in significant discretization errors. For the first time, we formulate a fully differentiable ordinal regression and train the network in end-to-end fashion. This enables us to include boundary and smoothness constraints in the optimization function, leading to smooth and edge-consistent depth maps. A novel per-pixel confidence map computation for depth refinement is also proposed. Extensive evaluation of the proposed model on challenging benchmarks reveals its superiority over recent state-of-the-art methods, both quantitatively and qualitatively. Additionally, we demonstrate practical utility of the proposed method for single camera bokeh solution using in-house dataset of challenging real-life images.