 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSEnSeI: A Deep Learning Module for Creating Sensor Independent Cloud Masks
Nov 16, 2021
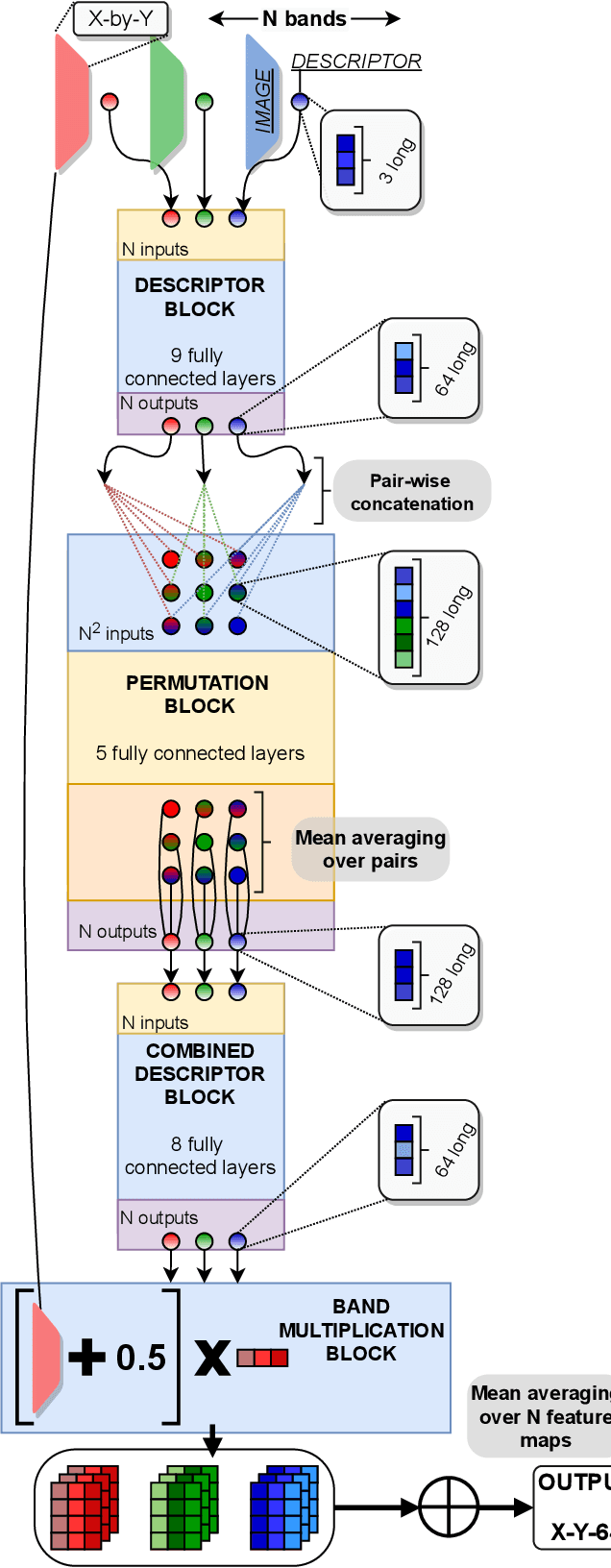
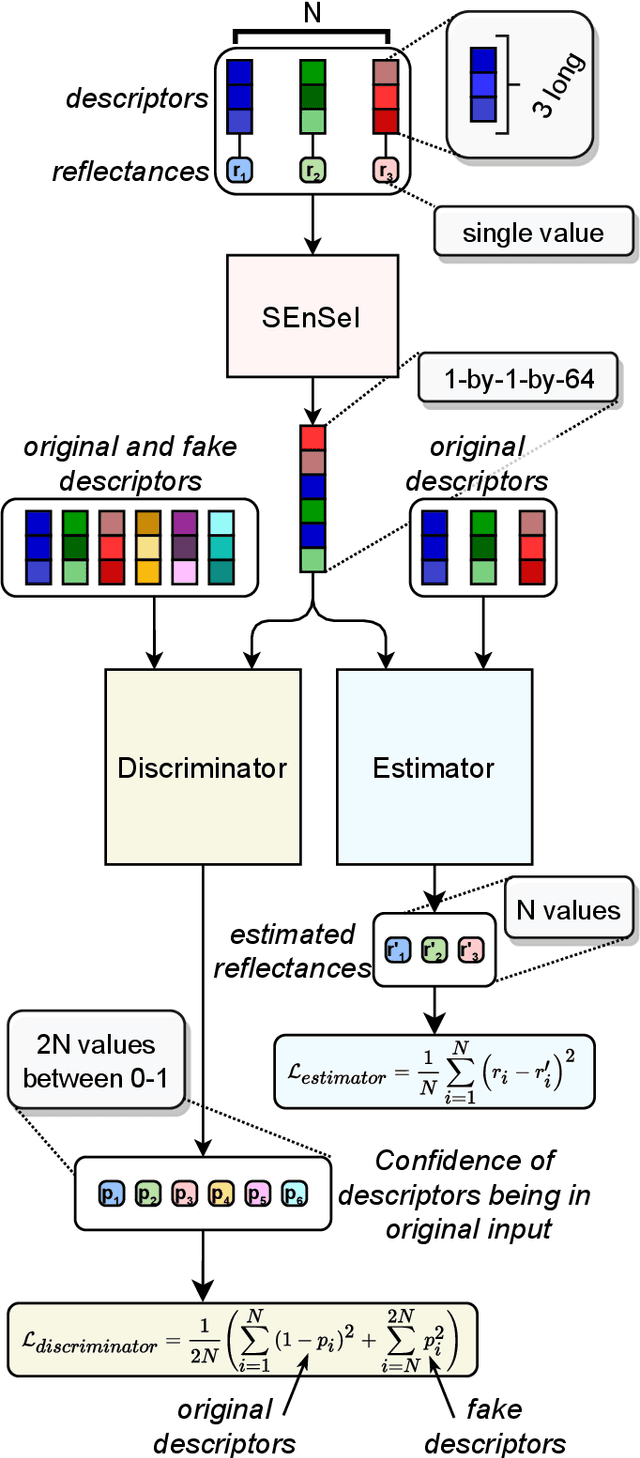
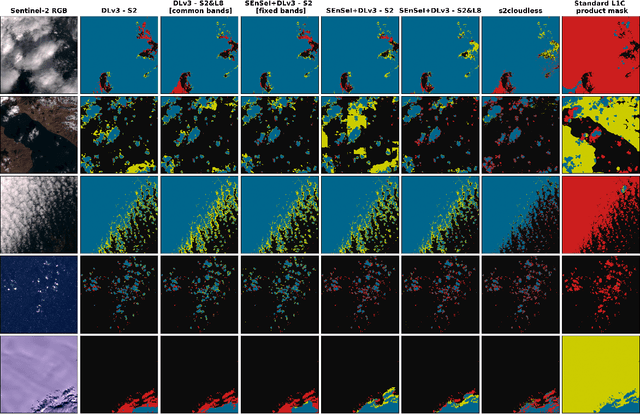
We introduce a novel neural network architecture -- Spectral ENcoder for SEnsor Independence (SEnSeI) -- by which several multispectral instruments, each with different combinations of spectral bands, can be used to train a generalised deep learning model. We focus on the problem of cloud masking, using several pre-existing datasets, and a new, freely available dataset for Sentinel-2. Our model is shown to achieve state-of-the-art performance on the satellites it was trained on (Sentinel-2 and Landsat 8), and is able to extrapolate to sensors it has not seen during training such as Landsat 7, Per\'uSat-1, and Sentinel-3 SLSTR. Model performance is shown to improve when multiple satellites are used in training, approaching or surpassing the performance of specialised, single-sensor models. This work is motivated by the fact that the remote sensing community has access to data taken with a hugely variety of sensors. This has inevitably led to labelling efforts being undertaken separately for different sensors, which limits the performance of deep learning models, given their need for huge training sets to perform optimally. Sensor independence can enable deep learning models to utilise multiple datasets for training simultaneously, boosting performance and making them much more widely applicable. This may lead to deep learning approaches being used more frequently for on-board applications and in ground segment data processing, which generally require models to be ready at launch or soon afterwards.
Measuring spatial uniformity with the hypersphere chord length distribution
Apr 12, 2020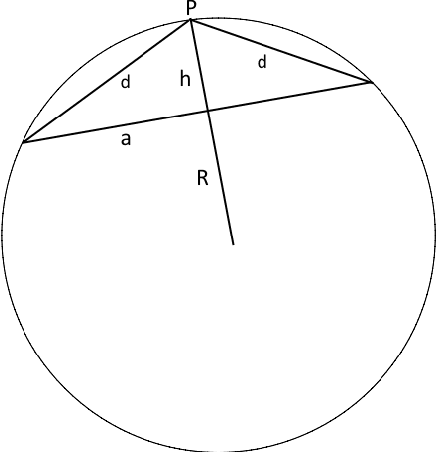
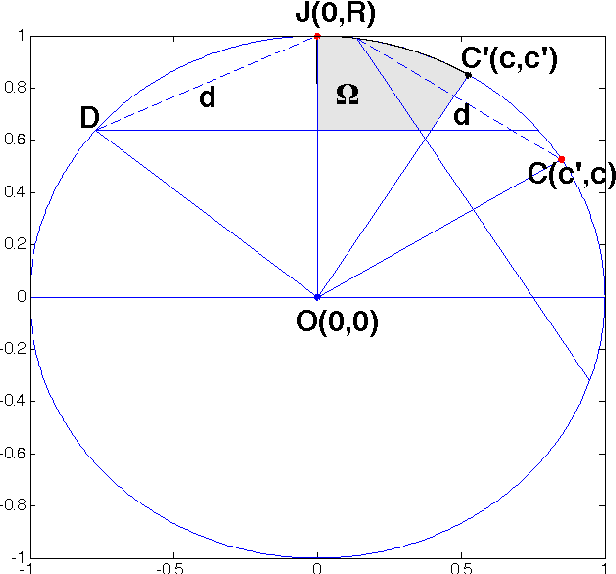
Data uniformity is a concept associated with several semantic data characteristics such as lack of features, correlation and sample bias. This article introduces a novel measure to assess data uniformity and detect uniform pointsets on high-dimensional Euclidean spaces. Spatial uniformity measure builds upon the isomorphism between hyperspherical chords and L2-normalised data Euclidean distances, which is implied by the fact that, in Euclidean spaces, L2-normalised data can be geometrically defined as points on a hypersphere. The imposed connection between the distance distribution of uniformly selected points and the hyperspherical chord length distribution is employed to quantify uniformity. More specifically,, the closed-form expression of hypersphere chord length distribution is revisited extended, before examining a few qualitative and quantitative characteristics of this distribution that can be rather straightforwardly linked to data uniformity. The experimental section includes validation in four distinct setups, thus substantiating the potential of the new uniformity measure on practical data-science applications.
Real-time tracker with fast recovery from target loss
Feb 12, 2019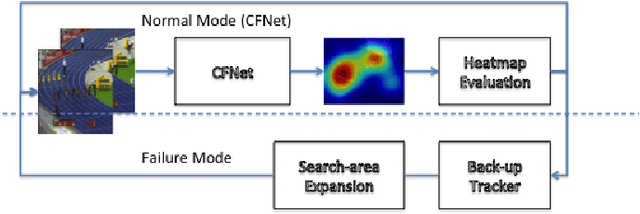
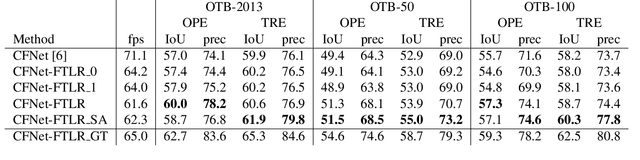
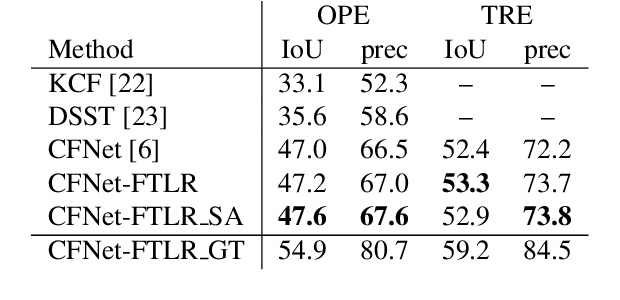
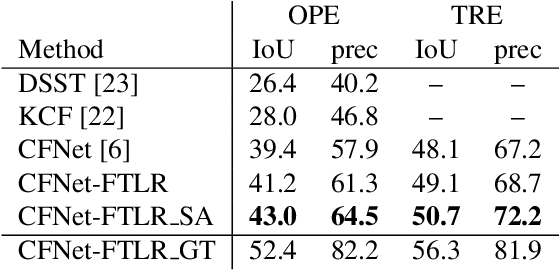
In this paper, we introduce a variation of a state-of-the-art real-time tracker (CFNet), which adds to the original algorithm robustness to target loss without a significant computational overhead. The new method is based on the assumption that the feature map can be used to estimate the tracking confidence more accurately. When the confidence is low, we avoid updating the object's position through the feature map; instead, the tracker passes to a single-frame failure mode, during which the patch's low-level visual content is used to swiftly update the object's position, before recovering from the target loss in the next frame. The experimental evidence provided by evaluating the method on several tracking datasets validates both the theoretical assumption that the feature map is associated to tracking confidence, and that the proposed implementation can achieve target recovery in multiple scenarios, without compromising the real-time performance.
Hide and Seek tracker: Real-time recovery from target loss
Jun 20, 2018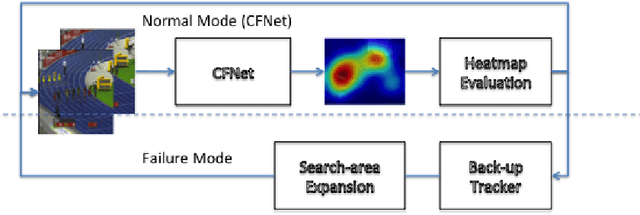

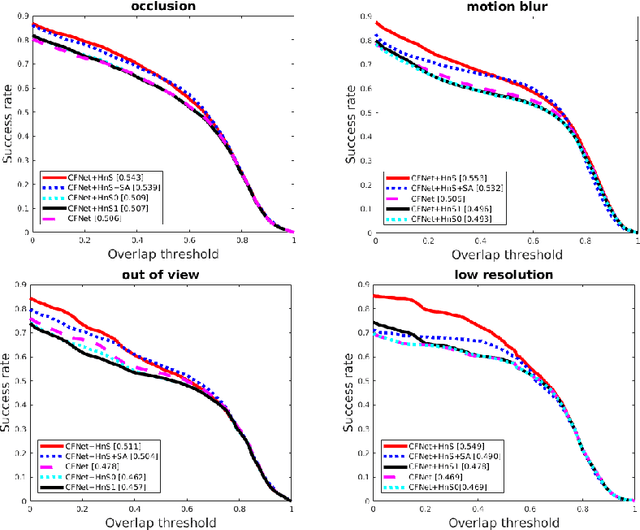
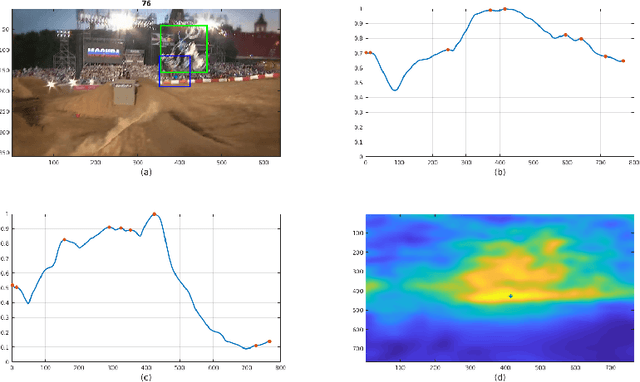
In this paper, we examine the real-time recovery of a video tracker from a target loss, using information that is already available from the original tracker and without a significant computational overhead. More specifically, before using the tracker output to update the target position we estimate the detection confidence. In the case of a low confidence, the position update is rejected and the tracker passes to a single-frame failure mode, during which the patch low-level visual content is used to swiftly update the object position, before recovering from the target loss in the next frame. Orthogonally to this improvement, we further enhance the running average method used for creating the query model in tracking-through-similarity. The experimental evidence provided by evaluation on standard tracking datasets (OTB-50, OTB-100 and OTB-2013) validate that target recovery can be successfully achieved without compromising the real-time update of the target position.
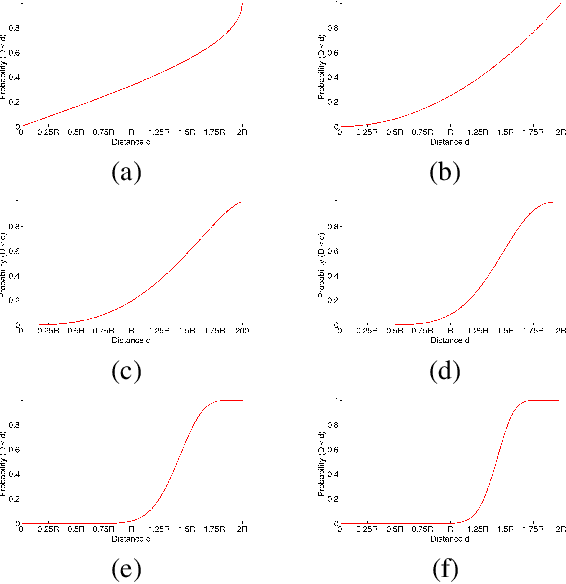
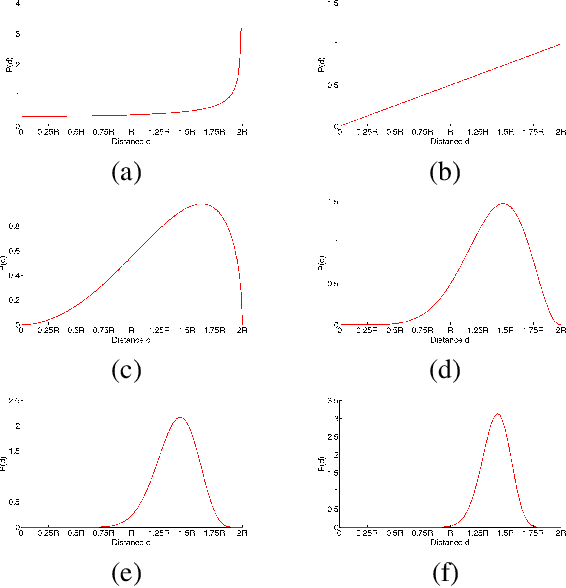
N-sphere chord length distribution
Nov 20, 2014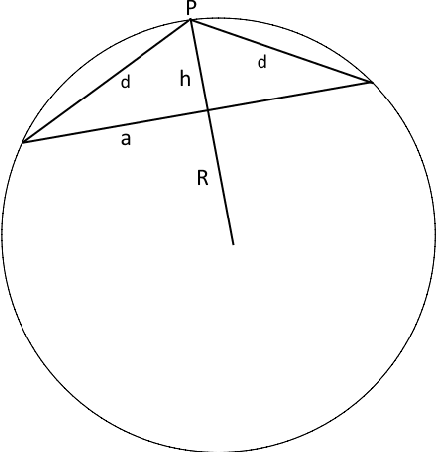


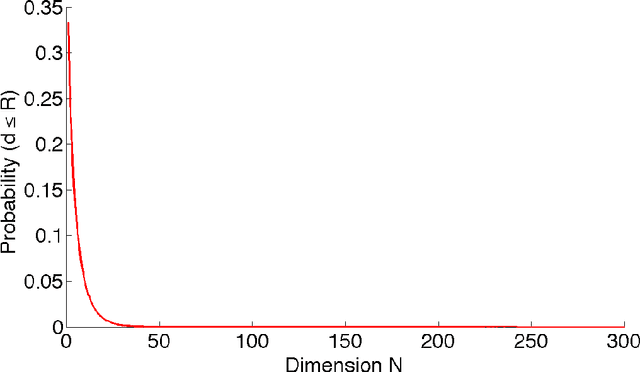
This work studies the chord length distribution, in the case where both ends lie on a $N$-dimensional hypersphere ($N \geq 2$). Actually, after connecting this distribution to the recently estimated surface of a hyperspherical cap \cite{SLi11}, closed-form expressions of both the probability density function and the cumulative distribution function are straightforwardly extracted, which are followed by a discussion on its basic properties, among which its dependence from the hypersphere dimension. Additionally, the distribution of the dot product of unitary vectors is estimated, a problem that is related to the chord length.