 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHide and Seek tracker: Real-time recovery from target loss
Paper and Code
Jun 20, 2018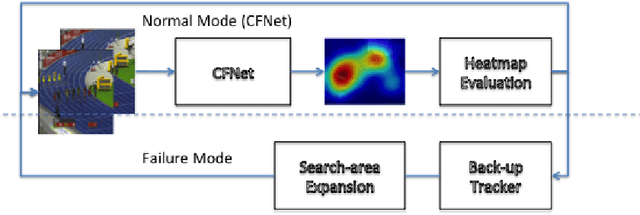

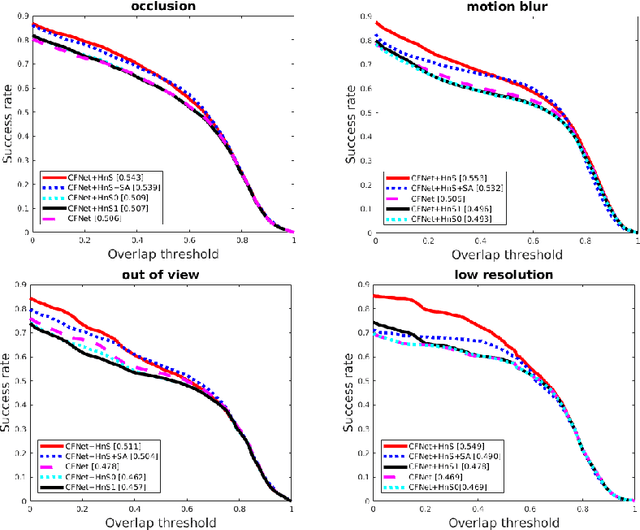
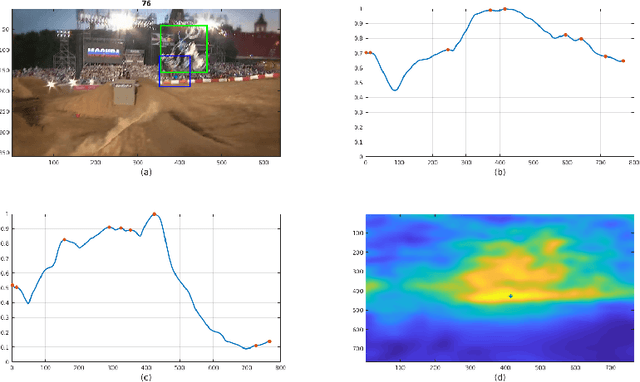
In this paper, we examine the real-time recovery of a video tracker from a target loss, using information that is already available from the original tracker and without a significant computational overhead. More specifically, before using the tracker output to update the target position we estimate the detection confidence. In the case of a low confidence, the position update is rejected and the tracker passes to a single-frame failure mode, during which the patch low-level visual content is used to swiftly update the object position, before recovering from the target loss in the next frame. Orthogonally to this improvement, we further enhance the running average method used for creating the query model in tracking-through-similarity. The experimental evidence provided by evaluation on standard tracking datasets (OTB-50, OTB-100 and OTB-2013) validate that target recovery can be successfully achieved without compromising the real-time update of the target position.