 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Vehicle Detection under Adverse Weather Conditions with Contrastive Learning
Sep 26, 2025Aside from common challenges in remote sensing like small, sparse targets and computation cost limitations, detecting vehicles from UAV images in the Nordic regions faces strong visibility challenges and domain shifts caused by diverse levels of snow coverage. Although annotated data are expensive, unannotated data is cheaper to obtain by simply flying the drones. In this work, we proposed a sideload-CL-adaptation framework that enables the use of unannotated data to improve vehicle detection using lightweight models. Specifically, we propose to train a CNN-based representation extractor through contrastive learning on the unannotated data in the pretraining stage, and then sideload it to a frozen YOLO11n backbone in the fine-tuning stage. To find a robust sideload-CL-adaptation, we conducted extensive experiments to compare various fusion methods and granularity. Our proposed sideload-CL-adaptation model improves the detection performance by 3.8% to 9.5% in terms of mAP50 on the NVD dataset.
Vehicle Detection Performance in Nordic Region
Mar 22, 2024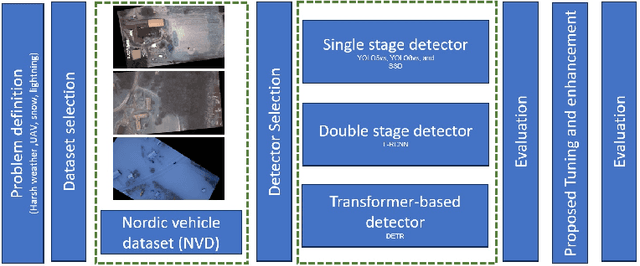

This paper addresses the critical challenge of vehicle detection in the harsh winter conditions in the Nordic regions, characterized by heavy snowfall, reduced visibility, and low lighting. Due to their susceptibility to environmental distortions and occlusions, traditional vehicle detection methods have struggled in these adverse conditions. The advanced proposed deep learning architectures brought promise, yet the unique difficulties of detecting vehicles in Nordic winters remain inadequately addressed. This study uses the Nordic Vehicle Dataset (NVD), which has UAV images from northern Sweden, to evaluate the performance of state-of-the-art vehicle detection algorithms under challenging weather conditions. Our methodology includes a comprehensive evaluation of single-stage, two-stage, and transformer-based detectors against the NVD. We propose a series of enhancements tailored to each detection framework, including data augmentation, hyperparameter tuning, transfer learning, and novel strategies designed explicitly for the DETR model. Our findings not only highlight the limitations of current detection systems in the Nordic environment but also offer promising directions for enhancing these algorithms for improved robustness and accuracy in vehicle detection amidst the complexities of winter landscapes. The code and the dataset are available at https://nvd.ltu-ai.dev
Nordic Vehicle Dataset (NVD): Performance of vehicle detectors using newly captured NVD from UAV in different snowy weather conditions
Apr 27, 2023
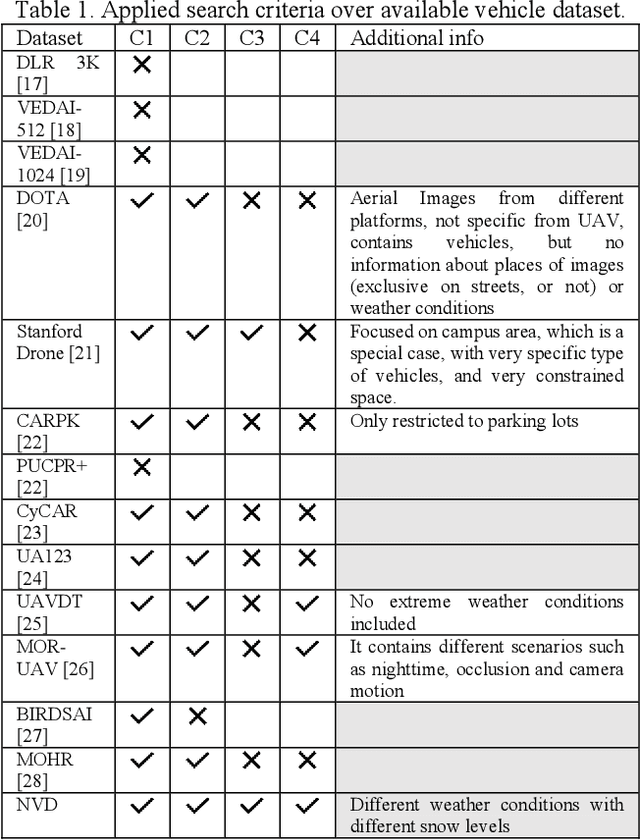
Vehicle detection and recognition in drone images is a complex problem that has been used for different safety purposes. The main challenge of these images is captured at oblique angles and poses several challenges like non-uniform illumination effect, degradations, blur, occlusion, loss of visibility, etc. Additionally, weather conditions play a crucial role in causing safety concerns and add another high level of challenge to the collected data. Over the past few decades, various techniques have been employed to detect and track vehicles in different weather conditions. However, detecting vehicles in heavy snow is still in the early stages because of a lack of available data. Furthermore, there has been no research on detecting vehicles in snowy weather using real images captured by unmanned aerial vehicles (UAVs). This study aims to address this gap by providing the scientific community with data on vehicles captured by UAVs in different settings and under various snow cover conditions in the Nordic region. The data covers different adverse weather conditions like overcast with snowfall, low light and low contrast conditions with patchy snow cover, high brightness, sunlight, fresh snow, and the temperature reaching far below -0 degrees Celsius. The study also evaluates the performance of commonly used object detection methods such as Yolo v8, Yolo v5, and fast RCNN. Additionally, data augmentation techniques are explored, and those that enhance the detectors' performance in such scenarios are proposed. The code and the dataset will be available at https://nvd.ltu-ai.dev