 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Detection Performance in Nordic Region
Mar 22, 2024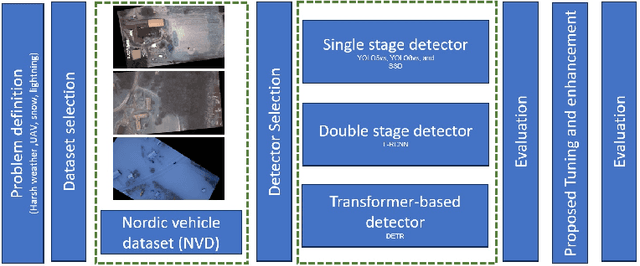

This paper addresses the critical challenge of vehicle detection in the harsh winter conditions in the Nordic regions, characterized by heavy snowfall, reduced visibility, and low lighting. Due to their susceptibility to environmental distortions and occlusions, traditional vehicle detection methods have struggled in these adverse conditions. The advanced proposed deep learning architectures brought promise, yet the unique difficulties of detecting vehicles in Nordic winters remain inadequately addressed. This study uses the Nordic Vehicle Dataset (NVD), which has UAV images from northern Sweden, to evaluate the performance of state-of-the-art vehicle detection algorithms under challenging weather conditions. Our methodology includes a comprehensive evaluation of single-stage, two-stage, and transformer-based detectors against the NVD. We propose a series of enhancements tailored to each detection framework, including data augmentation, hyperparameter tuning, transfer learning, and novel strategies designed explicitly for the DETR model. Our findings not only highlight the limitations of current detection systems in the Nordic environment but also offer promising directions for enhancing these algorithms for improved robustness and accuracy in vehicle detection amidst the complexities of winter landscapes. The code and the dataset are available at https://nvd.ltu-ai.dev