 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDoppDrive: Doppler-Driven Temporal Aggregation for Improved Radar Object Detection
Aug 17, 2025Radar-based object detection is essential for autonomous driving due to radar's long detection range. However, the sparsity of radar point clouds, especially at long range, poses challenges for accurate detection. Existing methods increase point density through temporal aggregation with ego-motion compensation, but this approach introduces scatter from dynamic objects, degrading detection performance. We propose DoppDrive, a novel Doppler-Driven temporal aggregation method that enhances radar point cloud density while minimizing scatter. Points from previous frames are shifted radially according to their dynamic Doppler component to eliminate radial scatter, with each point assigned a unique aggregation duration based on its Doppler and angle to minimize tangential scatter. DoppDrive is a point cloud density enhancement step applied before detection, compatible with any detector, and we demonstrate that it significantly improves object detection performance across various detectors and datasets.
Enhancing LMMSE Performance with Modest Complexity Increase via Neural Network Equalizers
Nov 03, 2024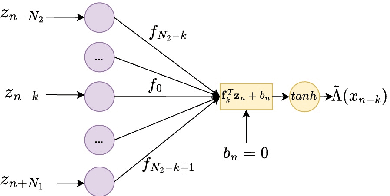
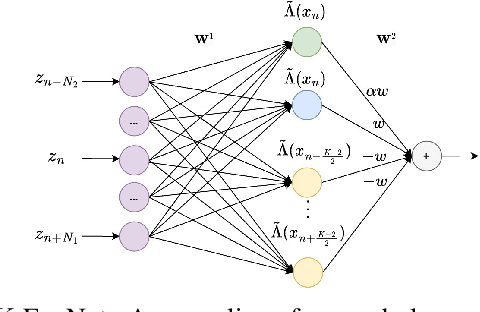
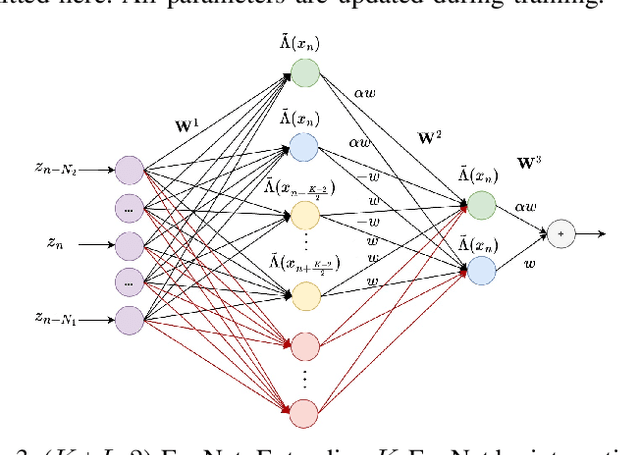
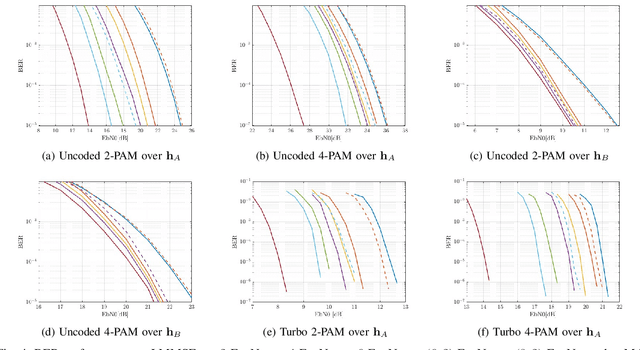
The BCJR algorithm is renowned for its optimal equalization, minimizing bit error rate (BER) over intersymbol interference (ISI) channels. However, its complexity grows exponentially with the channel memory, posing a significant computational burden. In contrast, the linear minimum mean square error (LMMSE) equalizer offers a notably simpler solution, albeit with reduced performance compared to the BCJR. Recently, Neural Network (NN) based equalizers have emerged as promising alternatives. Trained to map observations to the original transmitted symbols, these NNs demonstrate performance similar to the BCJR algorithm. However, they often entail a high number of learnable parameters, resulting in complexities comparable to or even larger than the BCJR. This paper explores the potential of NN-based equalization with a reduced number of learnable parameters and low complexity. We introduce a NN equalizer with complexity comparable to LMMSE, surpassing LMMSE performance and achieving a modest performance gap from the BCJR equalizer. A significant challenge with NNs featuring a limited parameter count is their susceptibility to converging to local minima, leading to suboptimal performance. To address this challenge, we propose a novel NN equalizer architecture with a unique initialization approach based on LMMSE. This innovative method effectively overcomes optimization challenges and enhances LMMSE performance, applicable both with and without turbo decoding.
Source Localization of an Unknown Transmission in Dense Multipath Environments
Oct 13, 2024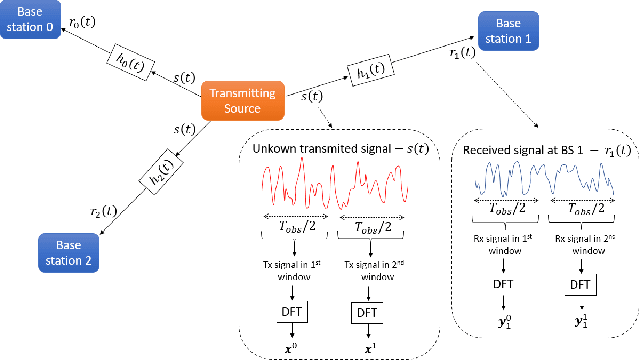
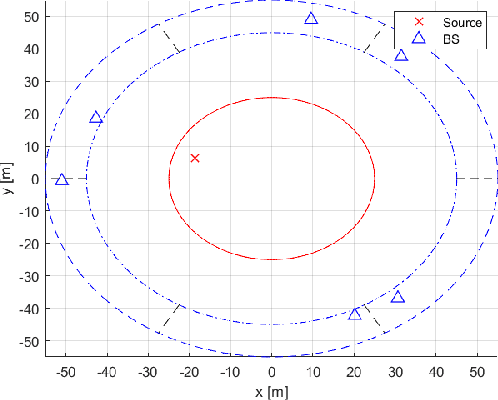
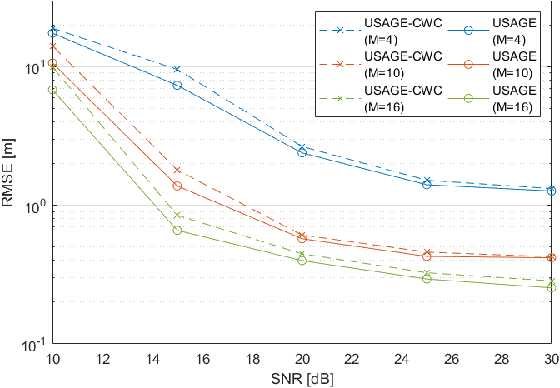
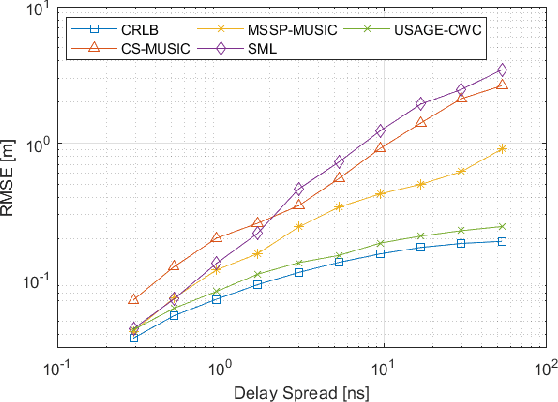
Accurately estimating the position of a wireless emitter in a multipath environment based on samples received at various base stations (in known locations) has been extensively explored in the literature. Existing approaches often assume that the emitted signal is known to the location system, while in some applications, such as locating surveillance or intelligence systems, it usually remains unknown. In this paper, we propose a novel estimator for determining the position of an emitter transmitting an unknown signal in a dense multipath environment with a given power-delay profile. We also derive the Carmer-Rao lower bound (CRLB) to evaluate the estimator's performance. Our approach is based on approximating the dense multipath channel in the frequency domain as a Gaussian random vector using the central limit theorem, formulating a log-likelihood cost function for the position and some features of the transmitted signal, and applying a maximum search over both. The optimization problem is non-convex and has no known analytical solutions, which makes it computationally infeasible for multidimensional brute-force search. To address this challenge, we developed a practical optimization algorithm that overcomes the computational complexity, using reasonable approximations, that provides a feasible position estimator. Through extensive evaluations, we demonstrate that the proposed estimator outperforms other state-of-the-art estimators. Moreover, as the number of base stations and SNR increase, our estimator approaches the CRLB, indicating its effectiveness and efficiency.
RadSimReal: Bridging the Gap Between Synthetic and Real Data in Radar Object Detection With Simulation
Apr 28, 2024Object detection in radar imagery with neural networks shows great potential for improving autonomous driving. However, obtaining annotated datasets from real radar images, crucial for training these networks, is challenging, especially in scenarios with long-range detection and adverse weather and lighting conditions where radar performance excels. To address this challenge, we present RadSimReal, an innovative physical radar simulation capable of generating synthetic radar images with accompanying annotations for various radar types and environmental conditions, all without the need for real data collection. Remarkably, our findings demonstrate that training object detection models on RadSimReal data and subsequently evaluating them on real-world data produce performance levels comparable to models trained and tested on real data from the same dataset, and even achieves better performance when testing across different real datasets. RadSimReal offers advantages over other physical radar simulations that it does not necessitate knowledge of the radar design details, which are often not disclosed by radar suppliers, and has faster run-time. This innovative tool has the potential to advance the development of computer vision algorithms for radar-based autonomous driving applications.
BoostRad: Enhancing Object Detection by Boosting Radar Reflections
Apr 27, 2024Automotive radars have an important role in autonomous driving systems. The main challenge in automotive radar detection is the radar's wide point spread function (PSF) in the angular domain that causes blurriness and clutter in the radar image. Numerous studies suggest employing an 'end-to-end' learning strategy using a Deep Neural Network (DNN) to directly detect objects from radar images. This approach implicitly addresses the PSF's impact on objects of interest. In this paper, we propose an alternative approach, which we term "Boosting Radar Reflections" (BoostRad). In BoostRad, a first DNN is trained to narrow the PSF for all the reflection points in the scene. The output of the first DNN is a boosted reflection image with higher resolution and reduced clutter, resulting in a sharper and cleaner image. Subsequently, a second DNN is employed to detect objects within the boosted reflection image. We develop a novel method for training the boosting DNN that incorporates domain knowledge of radar's PSF characteristics. BoostRad's performance is evaluated using the RADDet and CARRADA datasets, revealing its superiority over reference methods.
* WACV2024
Performance Analysis of Automotive SAR With Radar Based Motion Estimation
Apr 21, 2022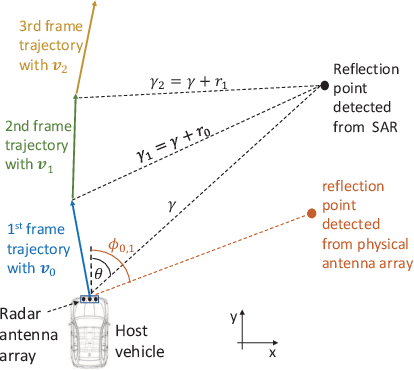
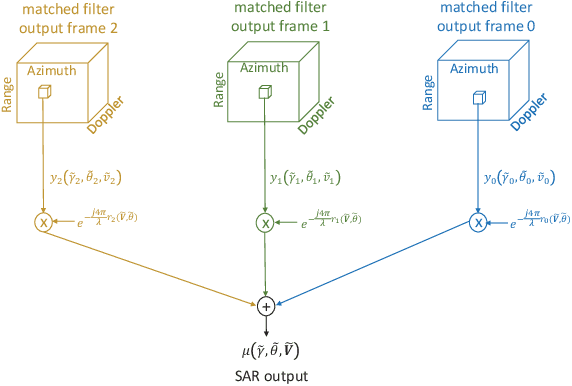
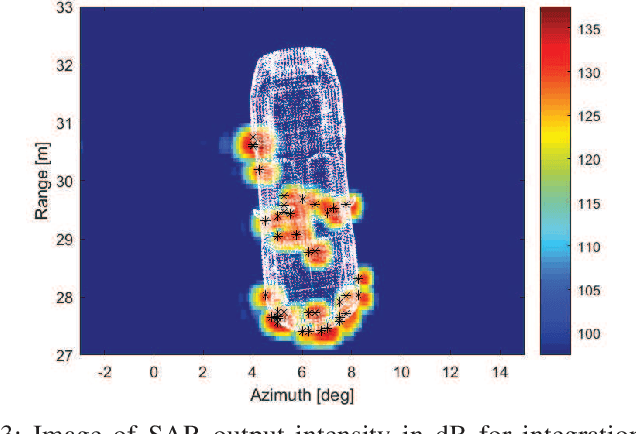
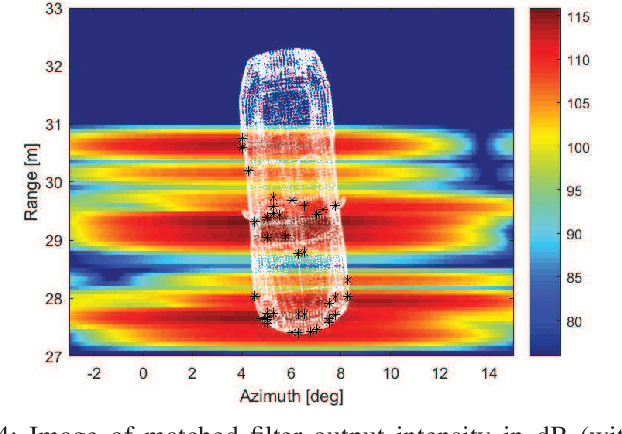
Automotive synthetic aperture radar (SAR) can achieve a significant angular resolution enhancement for detecting static objects, which is essential for automated driving. Obtaining high resolution SAR images requires precise ego vehicle velocity estimation. A small velocity estimation error can result in a focused SAR image with objects at offset angles. In this paper, we consider an automotive SAR system that produces SAR images of static objects based on ego vehicle velocity estimation from the radar return signal without the overhead in complexity and cost of using an auxiliary global navigation satellite system (GNSS) and inertial measurement unit (IMU). We derive a novel analytical approximation for the automotive SAR angle estimation error variance when the velocity is estimated by the radar. The developed analytical analysis closely predicts the true SAR angle estimation variance, and also provides insights on the effects of the radar parameters and the environment condition on the automotive SAR angle estimation error. We evaluate via the analytical analysis and simulation tests the radar settings and environment condition in which the automotive SAR attains a significant performance gain over the angular resolution of the short aperture physical antenna array. We show that, perhaps surprisingly, when the velocity is estimated by the radar the performance advantage of automotive SAR is realized only in limited conditions. Hence since its implementation comes with an increase in computation and system complexity as well as an increase in the detection delay it should be used carefully and selectively.
Direction of Arrival Estimation and Phase-Correction for Non-Coherent Sub-Arrays: A Convex Optimization Approach
Feb 15, 2022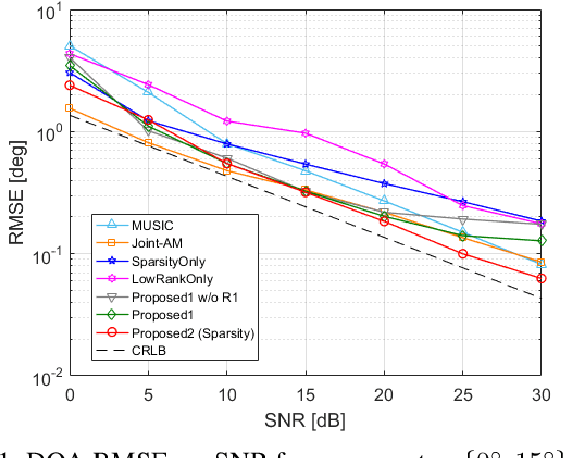
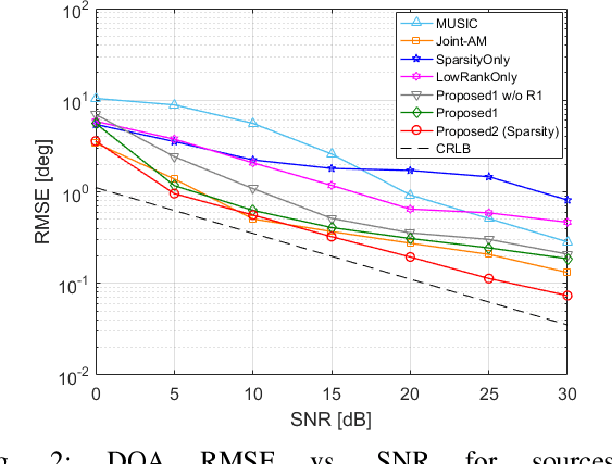
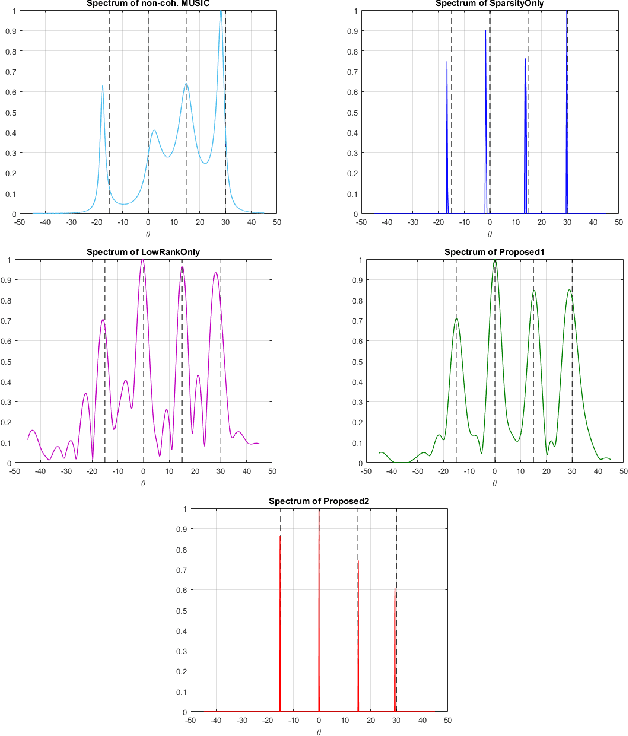
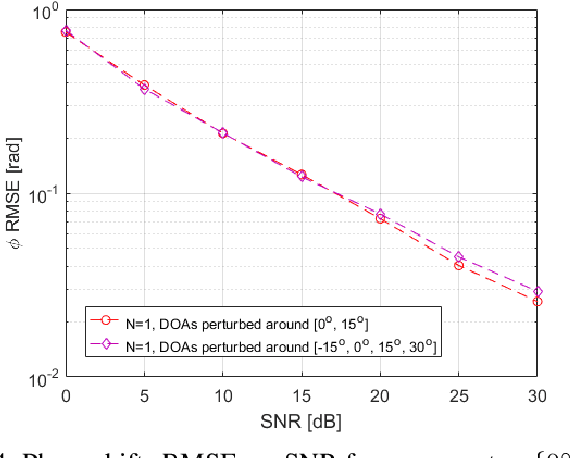
Estimating the direction of arrival (DOA) of sources is an important problem in aerospace and vehicular communication, localization and radar. In this paper, we consider a challenging multi-source DOA estimation task, where the receiving antenna array is composed of non-coherent sub-arrays, i.e., sub-arrays that observe different unknown phase shifts at every snapshot (e.g., due to waiving the demanding synchronization of local oscillators across the entire array). We formulate this problem as the reconstruction of joint sparse and low-rank matrices, and solve the problem's convex relaxation. To scale the optimization complexity with the number of snapshots better than general-purpose solvers, we design an optimization scheme, based on integrating the alternating direction method of multipliers and the accelerated proximal gradient techniques, that exploits the structure of the problem. While the DOAs can be estimated from the solution of the aforementioned convex problem, we further show how an improvement is obtained if, instead, one estimates from this solution only the sub-arrays' phase shifts. This is done using another, computationally-light, convex relaxation that is practically tight. Using the estimated phase shifts, "phase-corrected" observations are created and a final plain ("coherent") DOA estimation method can be applied. Numerical experiments show the performance advantages of the proposed strategies over existing methods.
Performance Advantages of Deep Neural Networks for Angle of Arrival Estimation
Feb 17, 2019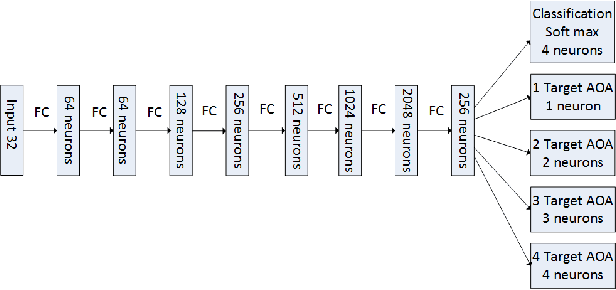
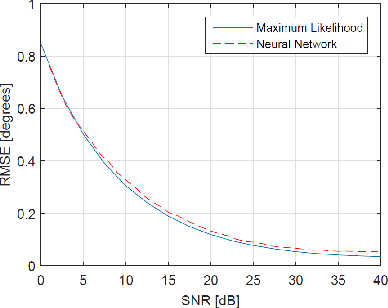


The problem of estimating the number of sources and their angles of arrival from a single antenna array observation has been an active area of research in the signal processing community for the last few decades. When the number of sources is large, the maximum likelihood estimator is intractable due to its very high complexity, and therefore alternative signal processing methods have been developed with some performance loss. In this paper, we apply a deep neural network (DNN) approach to the problem and analyze its advantages with respect to signal processing algorithms. We show that an appropriate designed network can attain the maximum likelihood performance with feasible complexity and outperform other feasible signal processing estimation methods over various signal to noise ratios and array response inaccuracies.