 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Trajectory Prediction on Highways Using Bird Eye View Representations and Deep Learning
Jul 04, 2022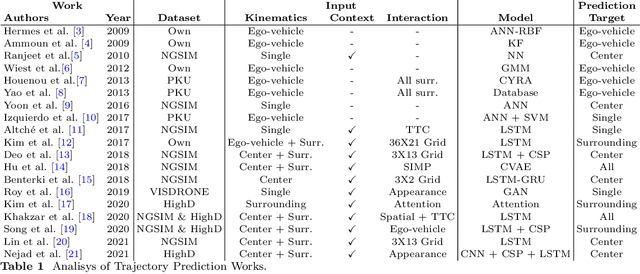
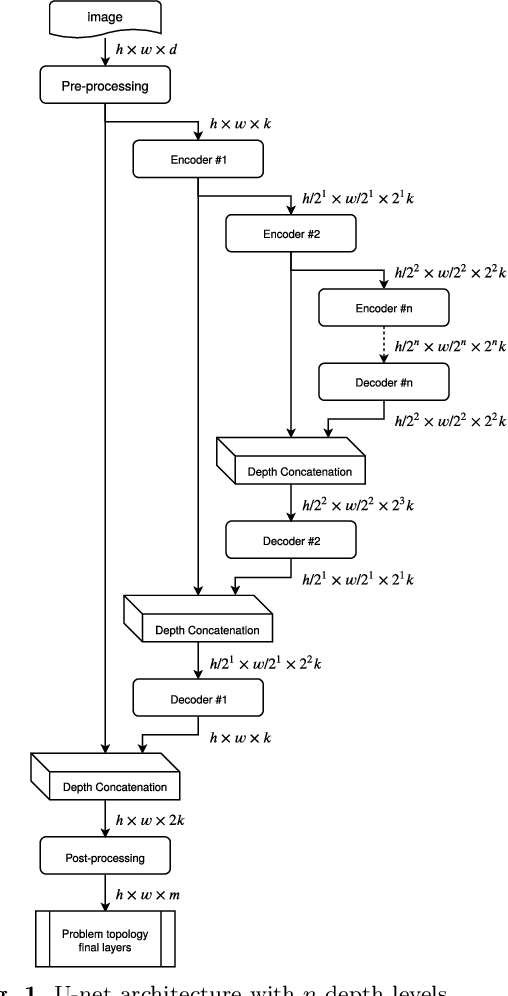
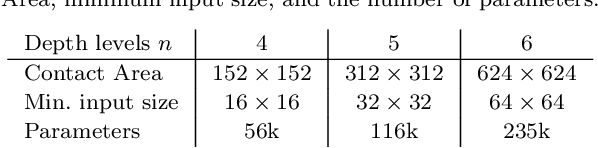
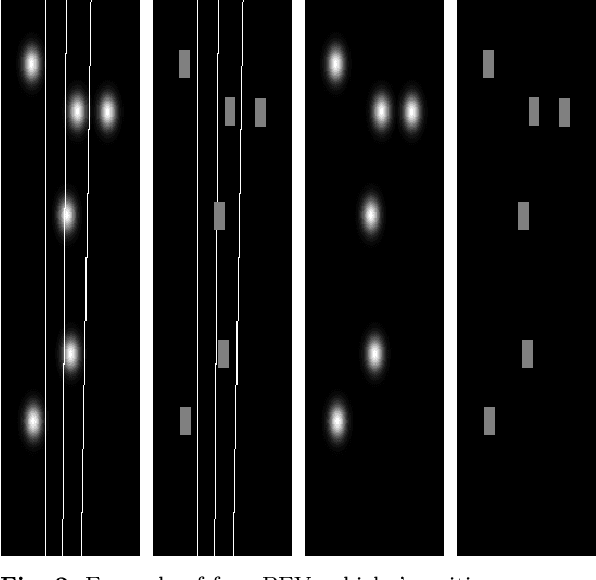
This work presents a novel method for predicting vehicle trajectories in highway scenarios using efficient bird's eye view representations and convolutional neural networks. Vehicle positions, motion histories, road configuration, and vehicle interactions are easily included in the prediction model using basic visual representations. The U-net model has been selected as the prediction kernel to generate future visual representations of the scene using an image-to-image regression approach. A method has been implemented to extract vehicle positions from the generated graphical representations to achieve subpixel resolution. The method has been trained and evaluated using the PREVENTION dataset, an on-board sensor dataset. Different network configurations and scene representations have been evaluated. This study found that U-net with 6 depth levels using a linear terminal layer and a Gaussian representation of the vehicles is the best performing configuration. The use of lane markings was found to produce no improvement in prediction performance. The average prediction error is 0.47 and 0.38 meters and the final prediction error is 0.76 and 0.53 meters for longitudinal and lateral coordinates, respectively, for a predicted trajectory length of 2.0 seconds. The prediction error is up to 50% lower compared to the baseline method.
WiFiNet: WiFi-based indoor localisation using CNNs
Apr 14, 2021
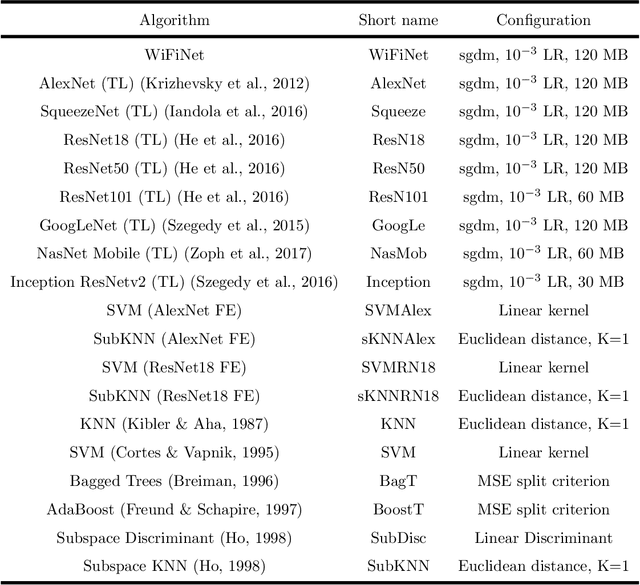
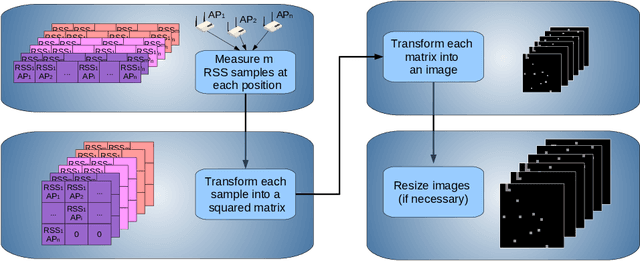
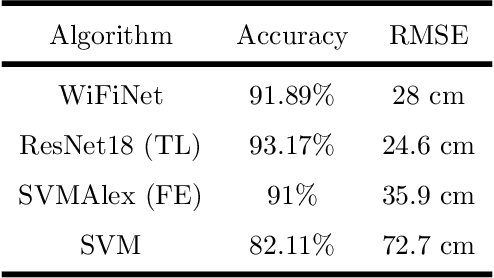
Different technologies have been proposed to provide indoor localisation: magnetic field, bluetooth , WiFi, etc. Among them, WiFi is the one with the highest availability and highest accuracy. This fact allows for an ubiquitous accurate localisation available for almost any environment and any device. However, WiFi-based localisation is still an open problem. In this article, we propose a new WiFi-based indoor localisation system that takes advantage of the great ability of Convolutional Neural Networks in classification problems. Three different approaches were used to achieve this goal: a custom architecture called WiFiNet designed and trained specifically to solve this problem and the most popular pre-trained networks using both transfer learning and feature extraction. Results indicate that WiFiNet is as a great approach for indoor localisation in a medium-sized environment (30 positions and 113 access points) as it reduces the mean localisation error (33%) and the processing time when compared with state-of-the-art WiFi indoor localisation algorithms such as SVM.