 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021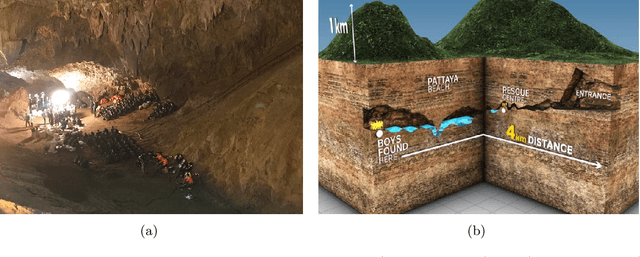
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
LAMP: Large-Scale Autonomous Mapping and Positioning for Exploration of Perceptually-Degraded Subterranean Environments
Mar 05, 2020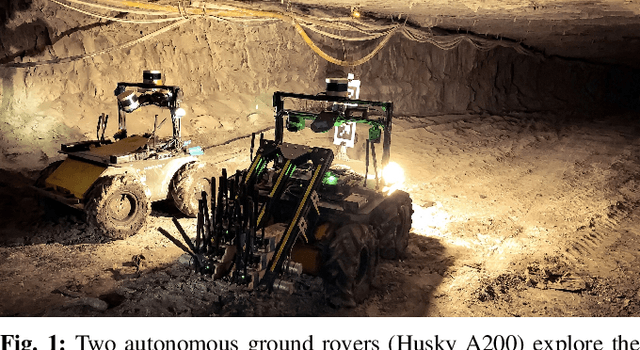
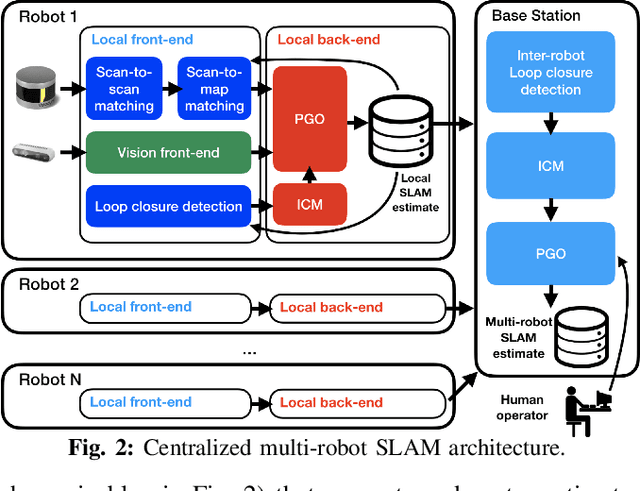
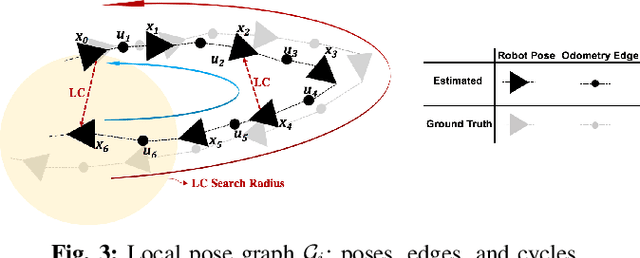
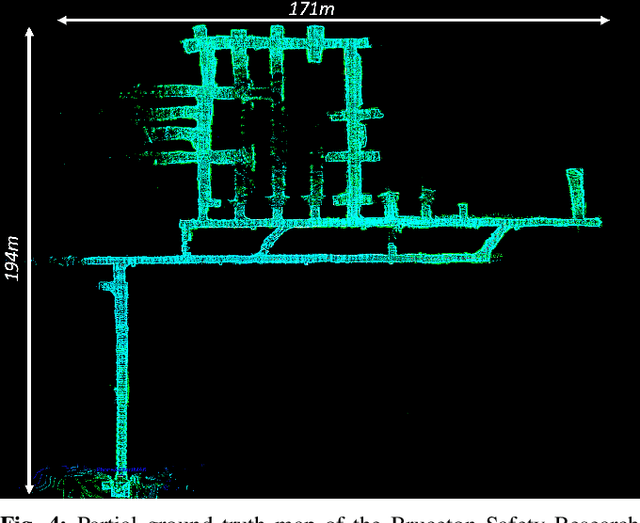
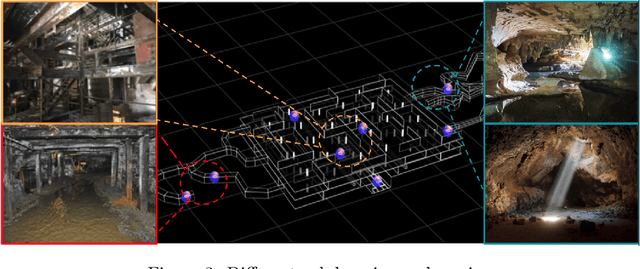
Simultaneous Localization and Mapping (SLAM) in large-scale, unknown, and complex subterranean environments is a challenging problem. Sensors must operate in off-nominal conditions; uneven and slippery terrains make wheel odometry inaccurate, while long corridors without salient features make exteroceptive sensing ambiguous and prone to drift; finally, spurious loop closures that are frequent in environments with repetitive appearance, such as tunnels and mines, could result in a significant distortion of the entire map. These challenges are in stark contrast with the need to build highly-accurate 3D maps to support a wide variety of applications, ranging from disaster response to the exploration of underground extraterrestrial worlds. This paper reports on the implementation and testing of a lidar-based multi-robot SLAM system developed in the context of the DARPA Subterranean Challenge. We present a system architecture to enhance subterranean operation, including an accurate lidar-based front-end, and a flexible and robust back-end that automatically rejects outlying loop closures. We present an extensive evaluation in large-scale, challenging subterranean environments, including the results obtained in the Tunnel Circuit of the DARPA Subterranean Challenge. Finally, we discuss potential improvements, limitations of the state of the art, and future research directions.