 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntermittent Strategic Cooperation of Two Selfish Agents on Graphs
Jun 15, 2026We study strategic space- and time-constrained cooperation between two self-interested agents through the Intermittent Strategic Cooperation-Based Two-Agent Path Planning (IC2PP) problem, a shortest-path game on graphs in which agents navigate toward individual targets while optionally cooperating at specific nodes to reduce their own travel times. Although such cooperation can strictly benefit both agents, it is strategically fragile: agents may deviate at any point along their paths. Modeled as a 2-player game, we characterize the structure of Pure Nash Equilibrium (PNE) joint strategies in IC2PP, and show that stable cooperation must follow a highly constrained form. We further prove that at least one PNE exists in every instance of IC2PP, and present a polynomial-time algorithm for enumerating all relevant PNEs. When multiple equilibria arise, we study coordination mechanisms based on bargaining-theoretic selection concepts and empirically compare equilibrium outcomes in terms of individual travel times and social welfare.
Convexified Message-Passing Graph Neural Networks
May 23, 2025

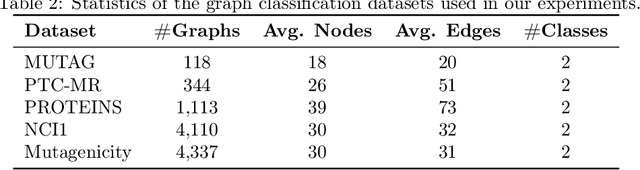

Graph Neural Networks (GNNs) have become prominent methods for graph representation learning, demonstrating strong empirical results on diverse graph prediction tasks. In this paper, we introduce Convexified Message Passing Graph Neural Networks (CGNNs), a novel and general framework that combines the power of message-passing GNNs with the tractability of convex optimization. By mapping their nonlinear filters into a reproducing kernel Hilbert space, CGNNs transform training into a convex optimization problem, which can be solved efficiently and optimally by projected gradient methods. This convexity further allows the statistical properties of CGNNs to be analyzed accurately and rigorously. For two-layer CGNNs, we establish rigorous generalization guarantees, showing convergence to the performance of the optimal GNN. To scale to deeper architectures, we adopt a principled layer-wise training strategy. Experiments on benchmark datasets show that CGNNs significantly exceed the performance of leading GNN models, achieving 10 to 40 percent higher accuracy in most cases, underscoring their promise as a powerful and principled method with strong theoretical foundations. In rare cases where improvements are not quantitatively substantial, the convex models either slightly exceed or match the baselines, stressing their robustness and wide applicability. Though over-parameterization is often employed to enhance performance in nonconvex models, we show that our CGNNs framework yields shallow convex models that can surpass these models in both accuracy and resource efficiency.
Uncertainty with UAV Search of Multiple Goal-oriented Targets
Mar 03, 2022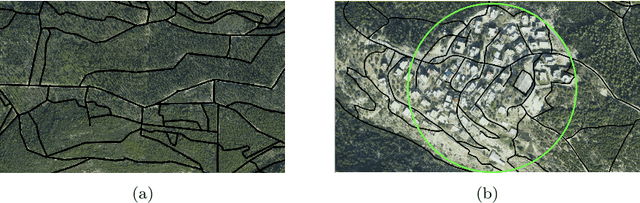
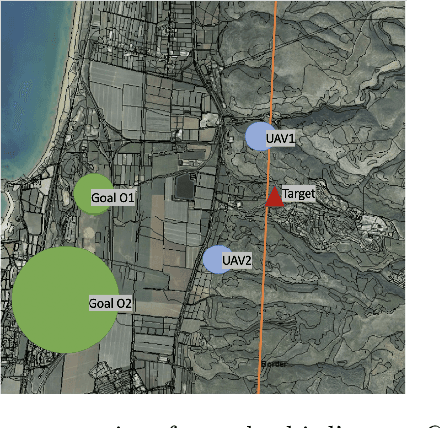

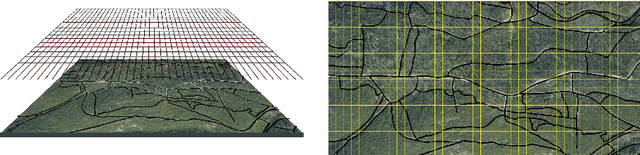
This paper considers the complex problem of a team of UAVs searching targets under uncertainty. The goal of the UAV team is to find all of the moving targets as quickly as possible before they arrive at their selected goal. The uncertainty considered is threefold: First, the UAVs do not know the targets' locations and destinations. Second, the sensing capabilities of the UAVs are not perfect. Third, the targets' movement model is unknown. We suggest a real-time algorithmic framework for the UAVs, combining entropy and stochastic-temporal belief, that aims at optimizing the probability of a quick and successful detection of all of the targets. We have empirically evaluated the algorithmic framework, and have shown its efficiency and significant performance improvement compared to other solutions. Furthermore, we have evaluated our framework using Peer Designed Agents (PDAs), which are computer agents that simulate targets and show that our algorithmic framework outperforms other solutions in this scenario.
Explicit Gradient Learning
Jun 09, 2020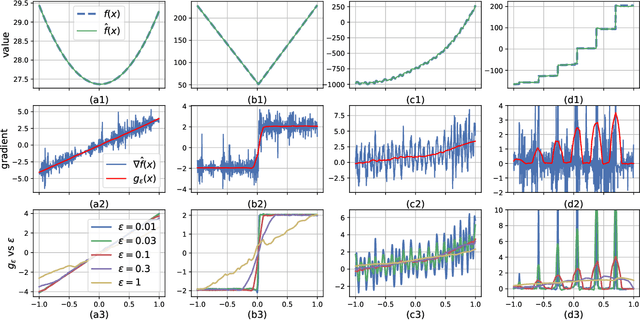
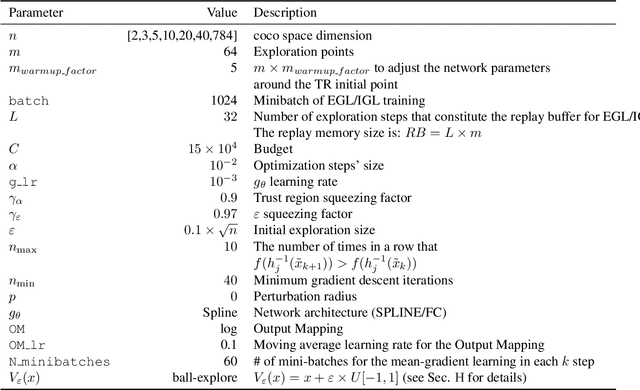
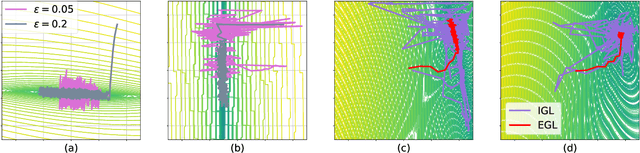
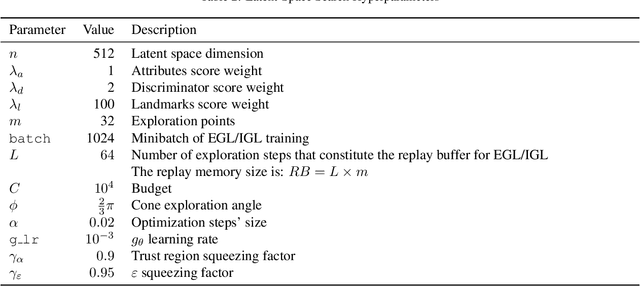
Black-Box Optimization (BBO) methods can find optimal policies for systems that interact with complex environments with no analytical representation. As such, they are of interest in many Artificial Intelligence (AI) domains. Yet classical BBO methods fall short in high-dimensional non-convex problems. They are thus often overlooked in real-world AI tasks. Here we present a BBO method, termed Explicit Gradient Learning (EGL), that is designed to optimize high-dimensional ill-behaved functions. We derive EGL by finding weak-spots in methods that fit the objective function with a parametric Neural Network (NN) model and obtain the gradient signal by calculating the parametric gradient. Instead of fitting the function, EGL trains a NN to estimate the objective gradient directly. We prove the convergence of EGL in convex optimization and its robustness in the optimization of integrable functions. We evaluate EGL and achieve state-of-the-art results in two challenging problems: (1) the COCO test suite against an assortment of standard BBO methods; and (2) in a high-dimensional non-convex image generation task.
Multi-Robot Adversarial Patrolling: Facing a Full-Knowledge Opponent
Jan 16, 2014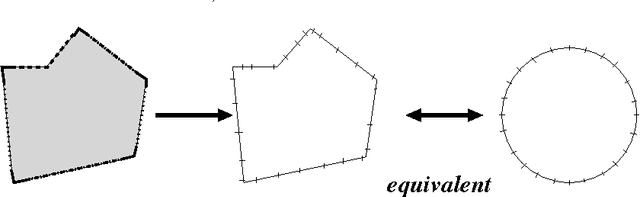
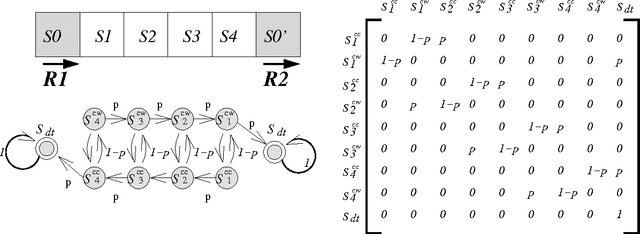
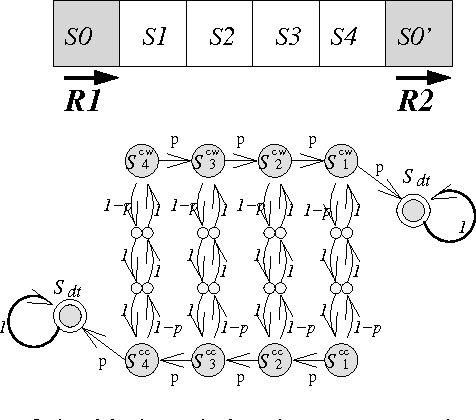
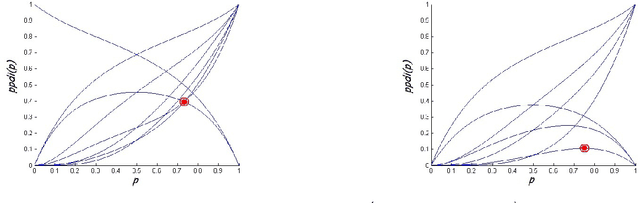
The problem of adversarial multi-robot patrol has gained interest in recent years, mainly due to its immediate relevance to various security applications. In this problem, robots are required to repeatedly visit a target area in a way that maximizes their chances of detecting an adversary trying to penetrate through the patrol path. When facing a strong adversary that knows the patrol strategy of the robots, if the robots use a deterministic patrol algorithm, then in many cases it is easy for the adversary to penetrate undetected (in fact, in some of those cases the adversary can guarantee penetration). Therefore this paper presents a non-deterministic patrol framework for the robots. Assuming that the strong adversary will take advantage of its knowledge and try to penetrate through the patrols weakest spot, hence an optimal algorithm is one that maximizes the chances of detection in that point. We therefore present a polynomial-time algorithm for determining an optimal patrol under the Markovian strategy assumption for the robots, such that the probability of detecting the adversary in the patrols weakest spot is maximized. We build upon this framework and describe an optimal patrol strategy for several robotic models based on their movement abilities (directed or undirected) and sensing abilities (perfect or imperfect), and in different environment models - either patrol around a perimeter (closed polygon) or an open fence (open polyline).