 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplaining Decisions of Agents in Mixed-Motive Games
Jul 21, 2024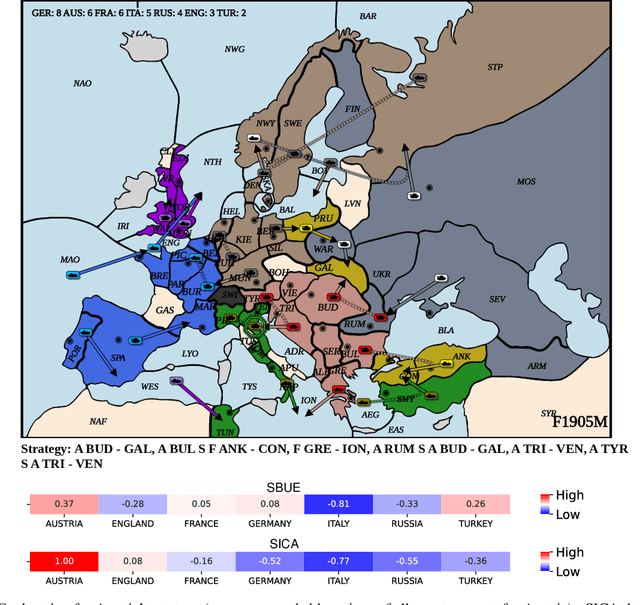
In recent years, agents have become capable of communicating seamlessly via natural language and navigating in environments that involve cooperation and competition, a fact that can introduce social dilemmas. Due to the interleaving of cooperation and competition, understanding agents' decision-making in such environments is challenging, and humans can benefit from obtaining explanations. However, such environments and scenarios have rarely been explored in the context of explainable AI. While some explanation methods for cooperative environments can be applied in mixed-motive setups, they do not address inter-agent competition, cheap-talk, or implicit communication by actions. In this work, we design explanation methods to address these issues. Then, we proceed to demonstrate their effectiveness and usefulness for humans, using a non-trivial mixed-motive game as a test case. Lastly, we establish generality and demonstrate the applicability of the methods to other games, including one where we mimic human game actions using large language models.
Efficient Customer Service Combining Human Operators and Virtual Agents
Sep 12, 2022
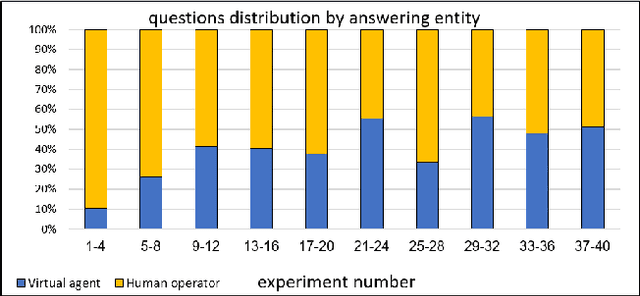
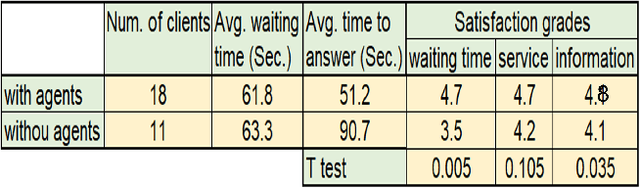
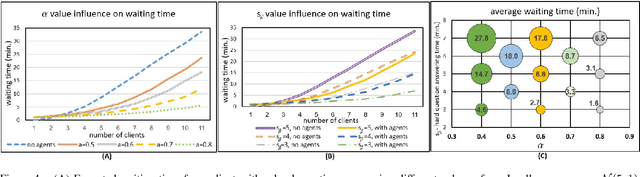
The prospect of combining human operators and virtual agents (bots) into an effective hybrid system that provides proper customer service to clients is promising yet challenging. The hybrid system decreases the customers' frustration when bots are unable to provide appropriate service and increases their satisfaction when they prefer to interact with human operators. Furthermore, we show that it is possible to decrease the cost and efforts of building and maintaining such virtual agents by enabling the virtual agent to incrementally learn from the human operators. We employ queuing theory to identify the key parameters that govern the behavior and efficiency of such hybrid systems and determine the main parameters that should be optimized in order to improve the service. We formally prove, and demonstrate in extensive simulations and in a user study, that with the proper choice of parameters, such hybrid systems are able to increase the number of served clients while simultaneously decreasing their expected waiting time and increasing satisfaction.
Uncertainty with UAV Search of Multiple Goal-oriented Targets
Mar 03, 2022
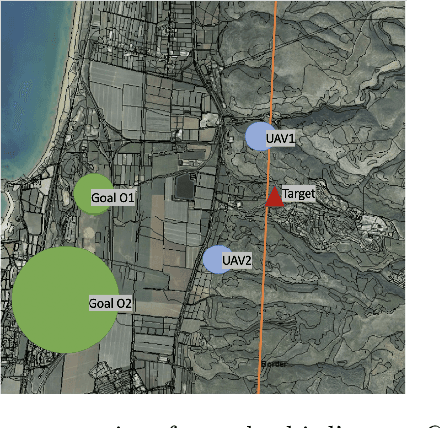

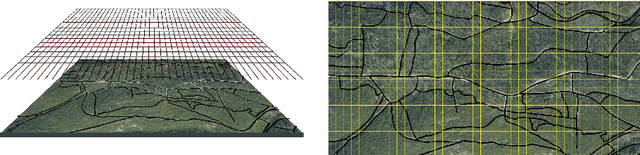
This paper considers the complex problem of a team of UAVs searching targets under uncertainty. The goal of the UAV team is to find all of the moving targets as quickly as possible before they arrive at their selected goal. The uncertainty considered is threefold: First, the UAVs do not know the targets' locations and destinations. Second, the sensing capabilities of the UAVs are not perfect. Third, the targets' movement model is unknown. We suggest a real-time algorithmic framework for the UAVs, combining entropy and stochastic-temporal belief, that aims at optimizing the probability of a quick and successful detection of all of the targets. We have empirically evaluated the algorithmic framework, and have shown its efficiency and significant performance improvement compared to other solutions. Furthermore, we have evaluated our framework using Peer Designed Agents (PDAs), which are computer agents that simulate targets and show that our algorithmic framework outperforms other solutions in this scenario.