 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty with UAV Search of Multiple Goal-oriented Targets
Mar 03, 2022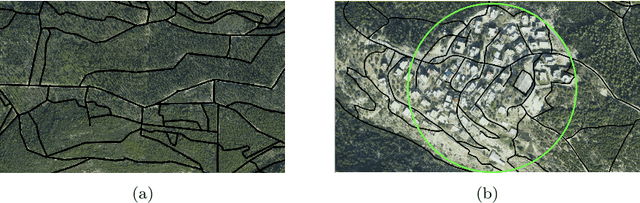
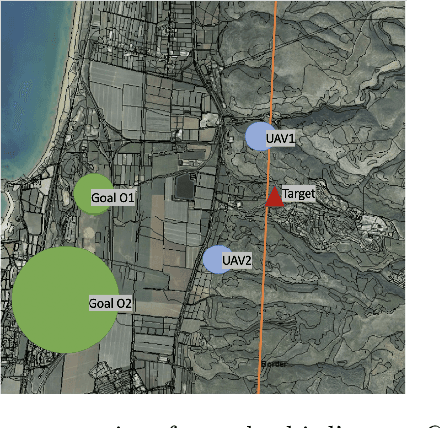

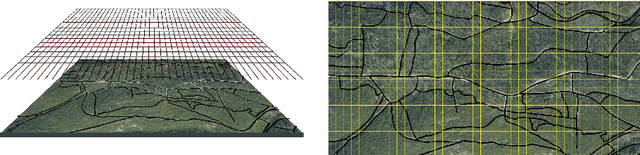
This paper considers the complex problem of a team of UAVs searching targets under uncertainty. The goal of the UAV team is to find all of the moving targets as quickly as possible before they arrive at their selected goal. The uncertainty considered is threefold: First, the UAVs do not know the targets' locations and destinations. Second, the sensing capabilities of the UAVs are not perfect. Third, the targets' movement model is unknown. We suggest a real-time algorithmic framework for the UAVs, combining entropy and stochastic-temporal belief, that aims at optimizing the probability of a quick and successful detection of all of the targets. We have empirically evaluated the algorithmic framework, and have shown its efficiency and significant performance improvement compared to other solutions. Furthermore, we have evaluated our framework using Peer Designed Agents (PDAs), which are computer agents that simulate targets and show that our algorithmic framework outperforms other solutions in this scenario.
Explicit Gradient Learning
Jun 09, 2020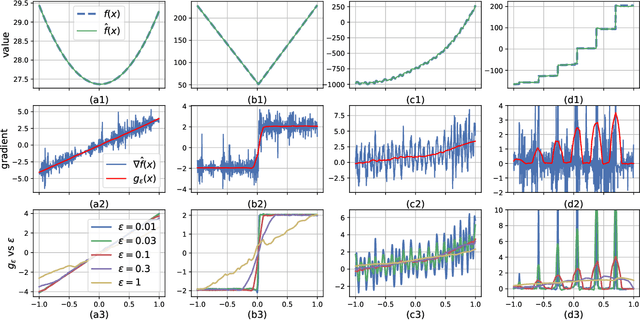
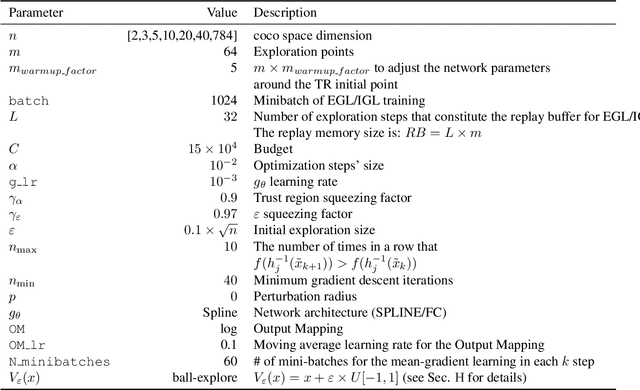
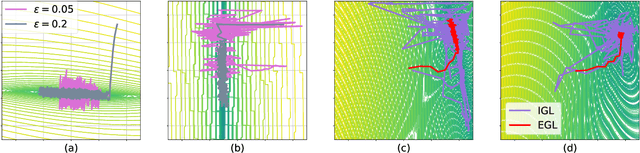
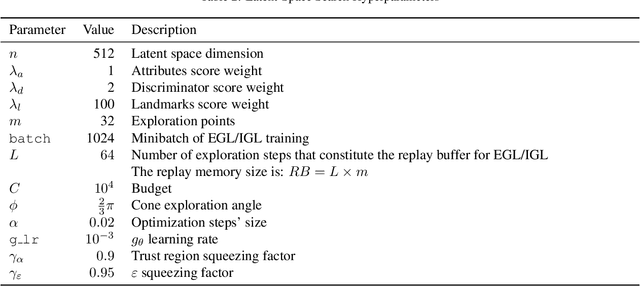
Black-Box Optimization (BBO) methods can find optimal policies for systems that interact with complex environments with no analytical representation. As such, they are of interest in many Artificial Intelligence (AI) domains. Yet classical BBO methods fall short in high-dimensional non-convex problems. They are thus often overlooked in real-world AI tasks. Here we present a BBO method, termed Explicit Gradient Learning (EGL), that is designed to optimize high-dimensional ill-behaved functions. We derive EGL by finding weak-spots in methods that fit the objective function with a parametric Neural Network (NN) model and obtain the gradient signal by calculating the parametric gradient. Instead of fitting the function, EGL trains a NN to estimate the objective gradient directly. We prove the convergence of EGL in convex optimization and its robustness in the optimization of integrable functions. We evaluate EGL and achieve state-of-the-art results in two challenging problems: (1) the COCO test suite against an assortment of standard BBO methods; and (2) in a high-dimensional non-convex image generation task.