 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoter Priming Campaigns: Strategies, Equilibria, and Algorithms
Dec 17, 2024Issue salience is a major determinant in voters' decisions. Candidates and political parties campaign to shift salience to their advantage - a process termed priming. We study the dynamics, strategies and equilibria of campaign spending for voter priming in multi-issue multi-party settings. We consider both parliamentary elections, where parties aim to maximize their share of votes, and various settings for presidential elections, where the winner takes all. For parliamentary elections, we show that pure equilibrium spending always exists and can be computed in time linear in the number of voters. For two parties and all settings, a spending equilibrium exists such that each party invests only in a single issue, and an equilibrium can be computed in time that is polynomial in the number of issues and linear in the number of voters. We also show that in most presidential settings no equilibrium exists. Additional properties of optimal campaign strategies are also studied.
Heterogeneous Multi-Robot Graph Coverage with Proximity and Movement Constraints
Dec 13, 2024Multi-Robot Coverage problems have been extensively studied in robotics, planning and multi-agent systems. In this work, we consider the coverage problem when there are constraints on the proximity (e.g., maximum distance between the agents, or a blue agent must be adjacent to a red agent) and the movement (e.g., terrain traversability and material load capacity) of the robots. Such constraints naturally arise in many real-world applications, e.g. in search-and-rescue and maintenance operations. Given such a setting, the goal is to compute a covering tour of the graph with a minimum number of steps, and that adheres to the proximity and movement constraints. For this problem, our contributions are four: (i) a formal formulation of the problem, (ii) an exact algorithm that is FPT in F, d and tw, the set of robot formations that encode the proximity constraints, the maximum nodes degree, and the tree-width of the graph, respectively, (iii) for the case that the graph is a tree: a PTAS approximation scheme, that given an approximation parameter epsilon, produces a tour that is within a epsilon times error(||F||, d) of the optimal one, and the computation runs in time poly(n) times h(1/epsilon,||F||). (iv) for the case that the graph is a tree, with $k=3$ robots, and the constraint is that all agents are connected: a PTAS scheme with multiplicative approximation error of 1+O(epsilon), independent of the maximal degree d.
Efficient Customer Service Combining Human Operators and Virtual Agents
Sep 12, 2022
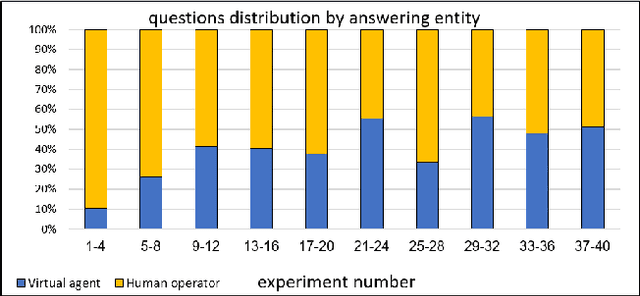
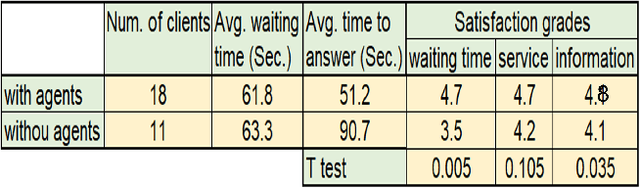
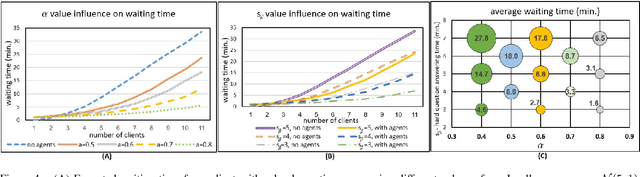
The prospect of combining human operators and virtual agents (bots) into an effective hybrid system that provides proper customer service to clients is promising yet challenging. The hybrid system decreases the customers' frustration when bots are unable to provide appropriate service and increases their satisfaction when they prefer to interact with human operators. Furthermore, we show that it is possible to decrease the cost and efforts of building and maintaining such virtual agents by enabling the virtual agent to incrementally learn from the human operators. We employ queuing theory to identify the key parameters that govern the behavior and efficiency of such hybrid systems and determine the main parameters that should be optimized in order to improve the service. We formally prove, and demonstrate in extensive simulations and in a user study, that with the proper choice of parameters, such hybrid systems are able to increase the number of served clients while simultaneously decreasing their expected waiting time and increasing satisfaction.
Robust Solutions for Multi-Defender Stackelberg Security Games
Apr 29, 2022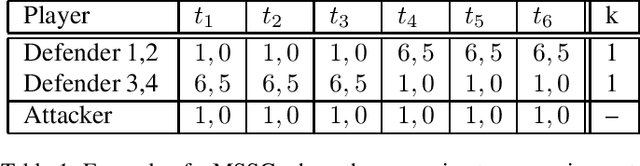
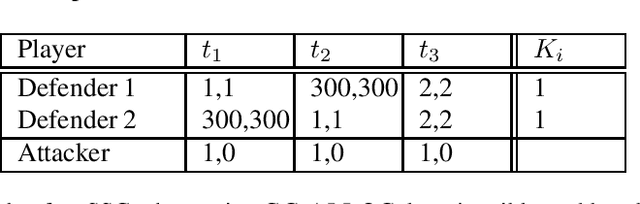
Multi-defender Stackelberg Security Games (MSSG) have recently gained increasing attention in the literature. However, the solutions offered to date are highly sensitive, wherein even small perturbations in the attacker's utility or slight uncertainties thereof can dramatically change the defenders' resulting payoffs and alter the equilibrium. In this paper, we introduce a robust model for MSSGs, which admits solutions that are resistant to small perturbations or uncertainties in the game's parameters. First, we formally define the notion of robustness, as well as the robust MSSG model. Then, for the non-cooperative setting, we prove the existence of a robust approximate equilibrium in any such game, and provide an efficient construction thereof. For the cooperative setting, we show that any such game admits a robust approximate alpha-core, provide an efficient construction thereof, and prove that stronger types of the core may be empty. Interestingly, the robust solutions can substantially increase the defenders' utilities over those of the non-robust ones.