 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStrategic Communication under Threat: Learning Information Trade-offs in Pursuit-Evasion Games
Oct 09, 2025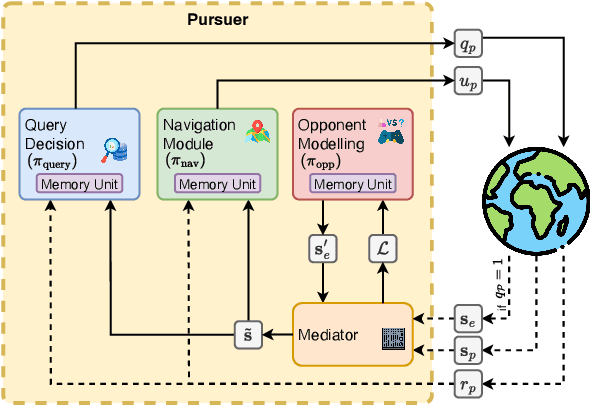
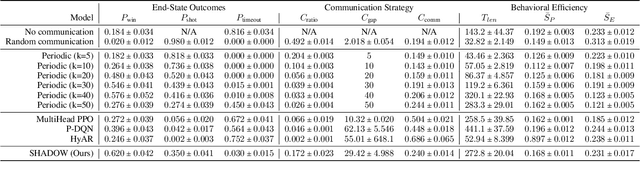
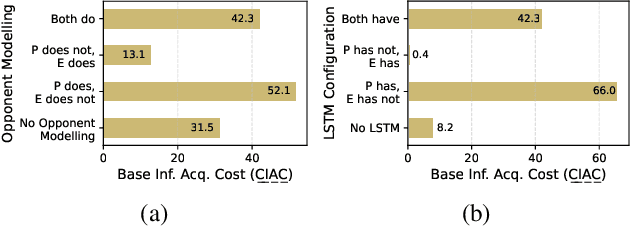
Adversarial environments require agents to navigate a key strategic trade-off: acquiring information enhances situational awareness, but may simultaneously expose them to threats. To investigate this tension, we formulate a PursuitEvasion-Exposure-Concealment Game (PEEC) in which a pursuer agent must decide when to communicate in order to obtain the evader's position. Each communication reveals the pursuer's location, increasing the risk of being targeted. Both agents learn their movement policies via reinforcement learning, while the pursuer additionally learns a communication policy that balances observability and risk. We propose SHADOW (Strategic-communication Hybrid Action Decision-making under partial Observation for Warfare), a multi-headed sequential reinforcement learning framework that integrates continuous navigation control, discrete communication actions, and opponent modeling for behavior prediction. Empirical evaluations show that SHADOW pursuers achieve higher success rates than six competitive baselines. Our ablation study confirms that temporal sequence modeling and opponent modeling are critical for effective decision-making. Finally, our sensitivity analysis reveals that the learned policies generalize well across varying communication risks and physical asymmetries between agents.
Heterogeneous Multi-Robot Graph Coverage with Proximity and Movement Constraints
Dec 13, 2024Multi-Robot Coverage problems have been extensively studied in robotics, planning and multi-agent systems. In this work, we consider the coverage problem when there are constraints on the proximity (e.g., maximum distance between the agents, or a blue agent must be adjacent to a red agent) and the movement (e.g., terrain traversability and material load capacity) of the robots. Such constraints naturally arise in many real-world applications, e.g. in search-and-rescue and maintenance operations. Given such a setting, the goal is to compute a covering tour of the graph with a minimum number of steps, and that adheres to the proximity and movement constraints. For this problem, our contributions are four: (i) a formal formulation of the problem, (ii) an exact algorithm that is FPT in F, d and tw, the set of robot formations that encode the proximity constraints, the maximum nodes degree, and the tree-width of the graph, respectively, (iii) for the case that the graph is a tree: a PTAS approximation scheme, that given an approximation parameter epsilon, produces a tour that is within a epsilon times error(||F||, d) of the optimal one, and the computation runs in time poly(n) times h(1/epsilon,||F||). (iv) for the case that the graph is a tree, with $k=3$ robots, and the constraint is that all agents are connected: a PTAS scheme with multiplicative approximation error of 1+O(epsilon), independent of the maximal degree d.
Robust Solutions for Multi-Defender Stackelberg Security Games
Apr 29, 2022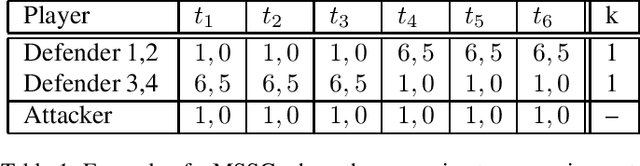
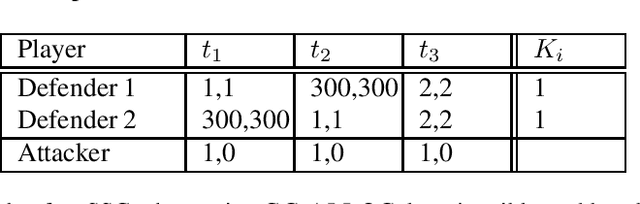
Multi-defender Stackelberg Security Games (MSSG) have recently gained increasing attention in the literature. However, the solutions offered to date are highly sensitive, wherein even small perturbations in the attacker's utility or slight uncertainties thereof can dramatically change the defenders' resulting payoffs and alter the equilibrium. In this paper, we introduce a robust model for MSSGs, which admits solutions that are resistant to small perturbations or uncertainties in the game's parameters. First, we formally define the notion of robustness, as well as the robust MSSG model. Then, for the non-cooperative setting, we prove the existence of a robust approximate equilibrium in any such game, and provide an efficient construction thereof. For the cooperative setting, we show that any such game admits a robust approximate alpha-core, provide an efficient construction thereof, and prove that stronger types of the core may be empty. Interestingly, the robust solutions can substantially increase the defenders' utilities over those of the non-robust ones.